-
Notifications
You must be signed in to change notification settings - Fork 16
Commit
This commit does not belong to any branch on this repository, and may belong to a fork outside of the repository.
- Loading branch information
Showing
20 changed files
with
789 additions
and
0 deletions.
There are no files selected for viewing
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,51 @@ | ||
| An overview of openLRSng functions that do not require being connected to a computer. | ||
|
|
||
| Binding | ||
| ------- | ||
| Hold down the bind button while connecting power to the transmitter. Once the transmitter beeps once, release | ||
| the bind button. The transmitter will begin to beep 5 times per second and the red LED will flash. The transmitter is now in bind mode, using the stored bind information. | ||
|
|
||
| Connect your receiver to power. After a moment, both the red and green LEDs should stay lit constantly and | ||
| the transmitter will stop beeping. The receiver is now bound and all binding and transmitter information has been sent to the receiver. To bind additional receivers without restarting the transmitter, press the bind button momentarily and the transmitter will begin to beep again. | ||
|
|
||
| There are three bind modes: | ||
| <dl> | ||
| <dt>Release button after 1st beep ( hold for < 5 seconds )</dt> | ||
| <dd>Regular bind mode.</dd> | ||
|
|
||
| <dt>Release button while beeping rapidly ( hold for 5 - 10 seconds )</dt> | ||
| <dd>Randomize the TX unique code and hop channels. This makes your TX unique but keeps settings related to telemetry etc.</dd> | ||
|
|
||
| <dt>Release button while TX is emitting solid tone ( hold for 10+ seconds )</dt> | ||
| <dd>Switches the active profile. There are four profile slots and the active profile is indicated by the short beeps on startup. Since this is painful to do if you need to rotate 3 times, you can also use the flip switch to change profiles at startup time if you have one on your transmitter.</dd> | ||
| </dl> | ||
|
|
||
| Randomizing | ||
| ----------- | ||
| Hold down the bind button while connecting power to the transmitter. Continue holding down the bind button | ||
| for about 5 seconds until the transmitter begins to beep slowly, then release the bind button. The transmitter will begin to beep 5 times per second and the red LED will flash. The transmitter is now in bind mode, and has randomized the binding data, making your transmitter’s ID unique. Bind your receivers as normal. All receivers previously bound with this transmitter will have to be re-bound. | ||
|
|
||
| Setting failsafe | ||
| ---------------- | ||
| Failsafe information is stored in the eeprom of each receiver. If failsafe information has not been set, the | ||
| receiver’s behaviour is to keep outputting the last information it received. If the RX stops getting information from the TX for a set duration the failsafe servo positions are loaded. | ||
|
|
||
| To set failsafe controls to a specific position, turn on a bound transmitter and receiver pair, hold the controls in the failsafe position, and hold down the bind button until the transmitter beeps and the red LED flashes on both the receiver and transmitter. Failsafe information is now set. Always test failsafe operation BEFORE you need to rely on it. | ||
|
|
||
| OpenLRSng also supports per-channel failsafe settings (hold last value or set to a specific value) as well as stop-ppm and stop-pwm, that can be enabled after a specified delay i.e. in a staged failsafe setup. These are all set through the RX settings menu and are saved to the RX's memory. | ||
|
|
||
| Transmitter profiles | ||
| -------------------- | ||
| The TX module has four separate 'slots' for settings which are completely isolated from each other and thus can have completely different setups. The profile can be swapped without any extra tools by keeping the 'bind' button down during TX startup more than ~10s. This can be used to have a profile with telemetry and another one without telemetry or to create a range testing mode with lower TX power. | ||
| Note that binding is also specific to a given profile, so if you have 2 receivers, you could either bind your TX to both at once and never fly them at the same time which usually is the case anyway, or you can use profile to bind one receiver to each profile and switch profiles at runtime. | ||
|
|
||
| While switching profiles by holding the bind button for 10 seconds is cumbersome, you can also switch profiles with the mode switch. Once the transmission starts, that same switch can then be used for powerboost if you selected that option in the configurator. | ||
|
|
||
| LED information | ||
| --------------- | ||
| <dl> | ||
| <dt>Transmitter</dt> | ||
| <dd>The green LED will flash constantly under normal operation. The red LED will illuminate to indicate a loss of signal from the controller, a lost packet from the receiver (if telemetry is enabled), a problem with the radio, or when failsafe information is set.</dd> | ||
| <dt>Receiver</dt> | ||
| <dd>The green LED will flash constantly under normal operation. The red LED will illuminate to indicate a loss of signal from the transmitter, a problem with the radio, or when failsafe information is set.</dd> | ||
| </dl> |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,5 @@ | ||
| Currently supported: | ||
|
|
||
| Arduino 1.0.x | ||
|
|
||
| Makefile included for use with above arduino version installed in /usr/share/arduino |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,37 @@ | ||
| ## Installation | ||
|
|
||
| ### Install Visual Studio Code | ||
|
|
||
| https://github.com/Microsoft/vscode | ||
|
|
||
| ### Install the PlatformIO extension | ||
| Click on `View` > `Command Palette...` | ||
|
|
||
|  | ||
|
|
||
| Find and click on `Extensions: Install Extensions` | ||
|
|
||
|  | ||
|
|
||
| Type `platformio` into the search box and click on `Install` under `PlatformIO IDE`. | ||
|
|
||
|  | ||
|
|
||
| ## Usage | ||
|
|
||
| ### 1. Open the OpenLRSng folder | ||
| Click on `File` > `Open Folder...` | ||
|
|
||
|  | ||
|
|
||
| This brings up the `Open Folder` dialog. Select the folder that has the `platformio.ini` file in it. | ||
|
|
||
|  | ||
|
|
||
| ### 2. Open the PlatformIO Project Activities | ||
|
|
||
| Click on the alien icon and select the drop-down menu for the board environment you are building to reveal all actions: | ||
|
|
||
|  | ||
|
|
||
| Firmware will be located at `.pioenvs/BOARD_TYPE_*/firmware.hex` |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,39 @@ | ||
| Always attach an antenna. | ||
| ========================= | ||
| Never power on any receiver or transmitter for any reason without a suitable antenna attached. This includes | ||
| when you are connecting it to a computer for software updates. All receivers are also capable of transmitting. | ||
|
|
||
| Connecting a device with on-board USB (DeluxeTX) | ||
| ------------------------------------------------ | ||
| Simply plug in the USB port to your computer and ensure the correct drivers have been installed. :) | ||
|
|
||
| Connecting a device that requires a USB-Serial adapter | ||
| ------------------------------------------------------ | ||
| **5 volt warning:** The radio modules on all 100mW models are not 5 volt tolerant. If you connect 5 volt power to the programming headers, you may damage the radio module. Only connect a programming cable that provides 3.3 volt power. Fortunately, the other components on the receivers and transmitters are tolerant of 5 volts, and the radio module is replaceable if you damage it. | ||
|
|
||
| **Also:** some USB-serial adapters are actually 5 volt when they claim to be 3.3 volt. Sneaky, eh? Verify that the power connection (Vcc) is actually 3.3 volts and not 5 volts _with a voltmeter_ if you are not absolutely sure. | ||
|
|
||
| Connect your USB-Serial adapter to the computer and ensure the drivers have installed. Driver installation for USB-serial adapters is outside the scope of this manual but links to drivers for the most popular adapters are at the bottom of this document. | ||
|
|
||
| The following connections must be made between the device and USB-Serial adapter: | ||
| * Ground | ||
| * TX | ||
| * RX | ||
|
|
||
| If you are flashing the device, an additional pin is required: (optional if simply changing settings) | ||
| * DTR | ||
|
|
||
| The device will also require a power connection. Transmitters may be powered by the radio as normal, and receiver may be powered by a BEC on the servo pins as normal. If your USB-serial adapter provides 3.3 volts, you may connect that to the power pin on the programming header instead. (Note that Hawkeye transmitters must be powered by the radio) | ||
|
|
||
| Drivers | ||
| ------- | ||
|
|
||
| **_DeluxeTX:_** This device requires drivers for Arduino Leonardo. The simplest way to install these drivers on Windows is to install the latest version of Arduino which is found [here](http://arduino.cc/en/Main/Software#toc3). Download and install the release appropriate for your platform. At the time of writing, version 1.5.5 Beta is the latest release. | ||
|
|
||
| **_CP2102:_** [Manufacturer's driver download page](http://www.silabs.com/products/mcu/pages/usbtouartbridgevcpdrivers.aspx) | ||
|
|
||
| _**FTDI:**_ [Manufacturer's driver download page](http://www.ftdichip.com/Drivers/VCP.htm) | ||
|
|
||
| ### Note: JR and Futaba modules (Non-Deluxe) | ||
|
|
||
| These transmitters need to be powered by your radio, as the power supplies on board don't like being powered with your USB-Serial adapter. These modules should be plugged into your radio and the radio switched on in order to program them. For OrangeRX modules it's common to cut a hole in the outer plate exposing the programming pins, so you don't have to unscrew the plate every time. |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,20 @@ | ||
| == DIY with 2 modules == | ||
| '''NOTE: this feature is experimental and should be used with care''' | ||
|
|
||
| 1. Set up modules | ||
| * Install custom beta firmware from http://openlrsng.org/beta/ (grab the latest) | ||
| * Use RX configurator to enable SCL and SDA outputs (from pinconfig) | ||
| * Enable the "slave mode" flag on one of the two receivers (the one going to be the slave) | ||
| 2. Connecting master and slave | ||
| * Use a 4 pin cable to connect the master and slave receivers. | ||
| <nowiki>SDA-SDA | ||
| SCL-SCL | ||
| GND-GND | ||
| VCC-VCC or 5V-5V</nowiki> | ||
| 3. Bind and configure the system normally. Notably the outputs on the slave are not currently usable. | ||
|
|
||
| NOTE: to remove the 'slave mode' flag you need to have the 'force bind' jumpper on the RX to allow it to bind. | ||
|
|
||
| == Brotronics Broversity RX == | ||
| This module has built in diversity with support for 2 antennas out of the box (it also supports a backup lipo ans buzzer for lost model finding). | ||
| You can read more about it here: http://marc.merlins.org/perso/rc/post_2015-11-14_Brotronics-Broversity-RX_-the-Missing-Manual.html |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,42 @@ | ||
| # Software topics | ||
|
|
||
| # Hardware topics | ||
| ## Generic | ||
| ## HawkEye Deluxe TX | ||
| ### What is the use of the "Serial" port on the bottom of the Deluxe Tx ? and how is it used ? | ||
| The serial port can be used for telemetry or for inputting serial RC protocol such as SBUS/SpektrumSAT/SUMD. In the case of a Taranis, you likely want to use PPM output and keep the serial port for serial passthrough. | ||
|
|
||
| ### What is the use of the "I2C" port on the bottom of the Deluxe Tx ? and how is it used ? | ||
| This is currently unused, however in future updates this can be used to connect two channel analog joystick (directly) or a I2C sensor for headtracking purposes. | ||
|
|
||
| ### Where is the schematics of the hawkeye hardware ? | ||
| The hawkeye schematics/board designs are not available via us, however the HawkEye deluxeTX is pretty much exactly same as the DTF-UHF deluxeTX https://github.com/DTFUHF/DTFUHF-1W-Deluxe | ||
|
|
||
| ### Where is the ports and leds exhaustive description of their functions and meanings of the tx ? | ||
| [[See LED Information at the end of the Basic Functions page|Basic-functions-guide#led-information]] | ||
|
|
||
|
|
||
| ### What it the corresponding emitting power (in watts) of the 0 to 7 levels that can be configured in the chrome configurator ? | ||
| This varies a bit but 5 = ~500mW, 6 = ~600mW, 7= ~800mW. It is not recommended to use power levels 0-4 as they may be unreliable on 1W modules. | ||
|
|
||
| ### What is the advised way to power the Tx unit : is it sufficient to have the three "GND-BATT-PPM" wire connected to the Taranis external connector or not ? | ||
| Yes, Taranis is able to give adequate power to the unit. The unit has internal DCDC converter and may consume upto around 3W (telemetry off, max power). This is about 250mA at 12V. | ||
|
|
||
| ## HawkEye 6ch RX | ||
| ### What is the purpose of the provided jumper | ||
| The jumper is provided for convenience and may be used to to short ch1-ch2 to enable forced bind, or ch3-ch4 to enable 'spectrum analyzer mode'. By default it is plugged on two GND pins and may be left there or removed. | ||
|
|
||
| ### What is the RSSI & PWM pin voltage and range ? Is it an analog signal or a PWM rssi ? | ||
| The CH3/RSSI pin can be configured to various modes | ||
| * PWM RSSI (8kHz 0-100% dutycycle) can be converted to 0-3.3V analog by enabling the onboard filter. | ||
| * LBEEP this is a special mode in which audible signal is output from the pin when packets are lost, this can be directly or via simple circuit be connected to FPV vTX | ||
| * normal channel output, any servo channel can be configured (RSSI as servo PWM can be achieved using the 'RSSI injection feature') | ||
|
|
||
| ### Is the schematic available | ||
| Directly no, however it is based on DTFUHF 6ch https://github.com/DTFUHF/DTFUHF-6ch | ||
|
|
||
| ## Hawkeye 9ch RX | ||
| ### What is the RSSI & PWM pin voltage and range ? Is it an analog signal or a PWM rssi ? | ||
| See 6ch above. | ||
| ### What is the PINs mapping of 3-pins rows on the receiver : signal, ground, Voltage ? (which row is what ?) | ||
| From board edge inwards: GND, +5(6)V, signal. [[Hardware Guide|Hardware-Guide]] |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,27 @@ | ||
| 1. Connect your device to the computer as shown in the ["Connecting to a computer guide"](Connecting-to-a-computer). Find the COM-port associated with the device. | ||
|
|
||
| 2. Open cTn's configurator for Google Chrome [(download it here)](http://goo.gl/iX7dJx) and select the COM-port from the menu. If you plugged in your USB-serial adapter after starting the configurator, click refresh to update the list of detected COM-ports, or click Disconnect if the configurator has auto-connected. Don’t click on Connect. Click on Start Firmware Flasher. | ||
|
|
||
| 3. Select the hardware you are flashing. Note that some receivers can also be flashed with transmitter firmware, allowing them to be used as transmitters with some additional components. | ||
|
|
||
| 4. Select whether or not to erase eeprom. It is always recommended to leave this enabled unless you know what | ||
| you’re doing. | ||
|
|
||
| 5. Click the Flash Firmware button. If the flashing was unsuccessful, check to make sure the correct COM-port is selected, the pins have been connected properly (you may have to swap TX and RX, depending on your USB-serial adapter), the LEDs on the receiver are off for the duration of the flashing (indicating that the device is indeed being flashed), and that the device being flashed is being powered properly. Some 1-watt transmitters draw more power than a USB port can give; in this case the transmitter must be powered by a battery while flashing. | ||
|
|
||
| ## Hardware specific notes | ||
| ### Hawkeye 1W JR/Futaba modules | ||
| Easiest method to flash these units is to use 3v3 CP2102/FTDI adapter connected to the (1x6) serial header with following procedure. | ||
|
|
||
| 1. Plug the module into the radio and connect the serial to it but have it off USB | ||
|
|
||
| 2. Turn radio on | ||
|
|
||
| 3. plug in USB to PC | ||
|
|
||
| 4. unplug the module from the Radio | ||
|
|
||
| 5. Flash using the configurator | ||
|
|
||
| Same procedure can be used when connecing it for configuration. | ||
| For convinience cut a hole on the backside of the module box so that the serial header can be accessed without opening the module. |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,46 @@ | ||
| General information on hardware | ||
| =============================== | ||
| The following hardware is compatible with openLRSng: | ||
|
|
||
| * Flytron M2/M3 TX / OrangeRX UHF TX | ||
| * Flytron RX v2 / OrangeRX UHF RX / HawkEye RX | ||
| * openLRSngTX (and its derivatives) / HawkEye TX | ||
| * DTFUHF 4ch RX | ||
| * DTFUHF DeluxeTX | ||
|
|
||
| (list incomplete, see [Table of supported hardware](supported-hardware---feature-table)). | ||
| All TX/RXs above are compatible with each other as well. | ||
|
|
||
| Note that some RXs can also be used as TXs with some additional hardware setup. | ||
|
|
||
| General information on inputs / outputs | ||
| ======================================= | ||
| Servo channel outputs | ||
| --------------------- | ||
| Servo PWM outputs can be mapped to any port. The DTF UHF 4-channel receiver has 6 such ports and the Hobbyking/Flytron RX has 13 such ports. The "extra" ports are the TX/RX and SDA/SCL pins. RC channels can be reused: for example, you may have RC channel 1 output on two different pins at the same time. | ||
|
|
||
| Special outputs | ||
| --------------- | ||
| Other port configurations can only be mapped to one pin. These outputs include: High-frequency RSSI and LBEEP; serial TX and RX; i2c signals (SDA and SCL); and PPM. Similarly, analogue inputs can only be enabled on specific pins. | ||
| Receivers | ||
| ========= | ||
|
|
||
| DTF UHF 4-channel | ||
| ----------------- | ||
| 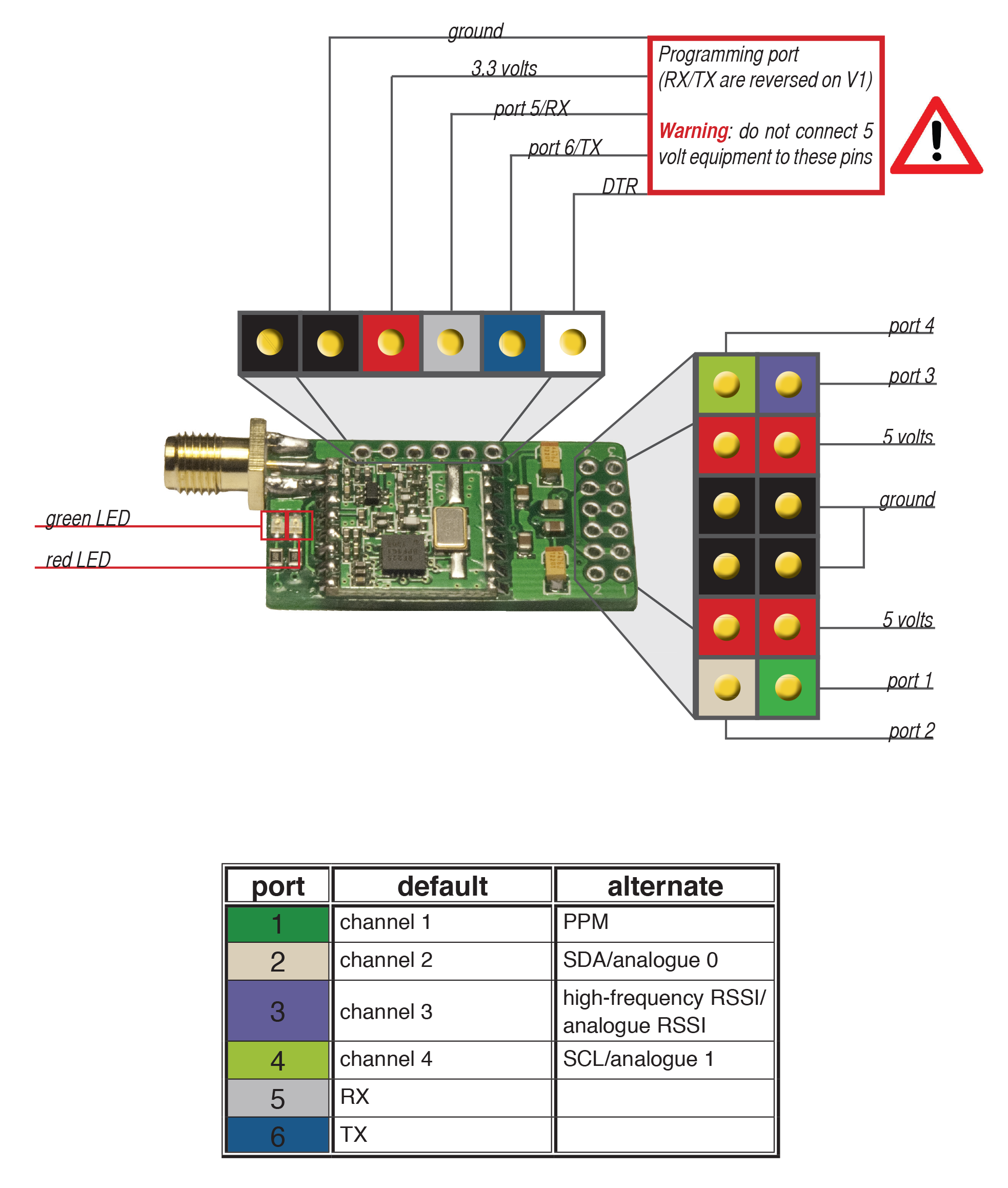 | ||
|
|
||
| Version 2 and newer RXs also have the RSSI filter onboard, to filter High-Frequency RSSI into 0-3.3V RSSI. Enable the filter by soldering these two pads together: | ||
|
|
||
| 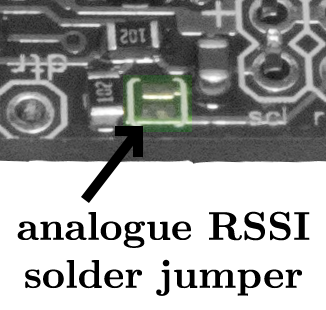 | ||
|
|
||
| Hawkeye / Hobbyking / Flytron 9-channel | ||
| ----------------------------- | ||
| 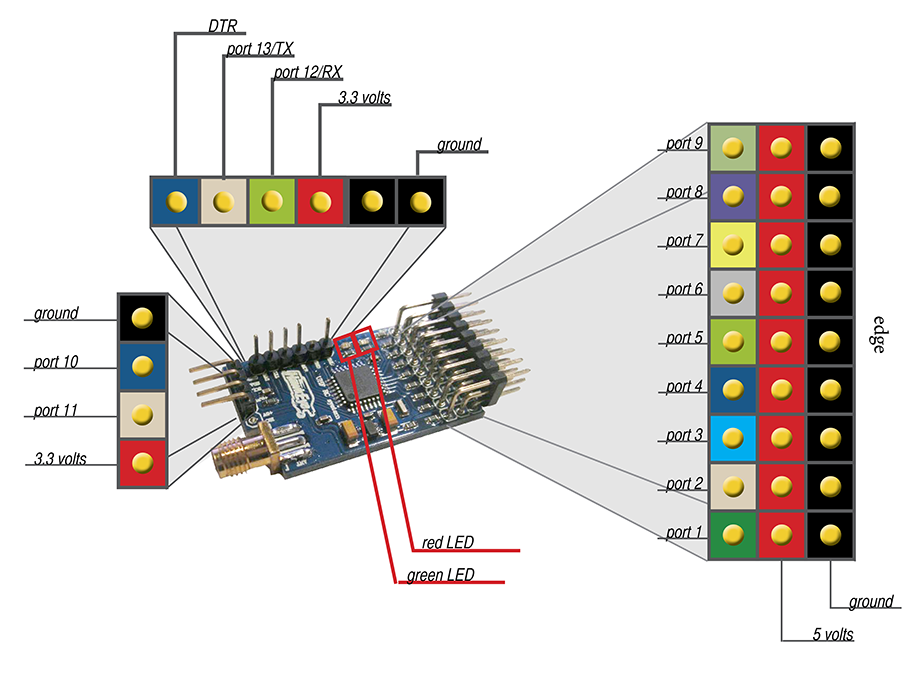 | ||
|
|
||
|  | ||
|
|
||
| Note on Hawkeye 6ch/9ch ICSP pins | ||
| --------------------------------- | ||
| Hawkeye 6ch/9ch receivers have non-standard ICSP pinout. | ||
|
|
||
| 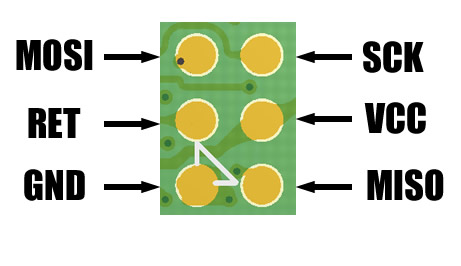 |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,22 @@ | ||
| # Hardware | ||
|
|
||
| They JR module can be fit in the back of a JR compatible radio like the Taranis. | ||
| Currently (on the Taranis) only the PPM mode can be used to communicate between radio and module. | ||
| It is possible to have PPM setup on your TX unit and output a serial format (SBUS/Spektrum/SUMD) on the RX unit. | ||
|
|
||
| **Works out of the box for Taranis X9D**: I ordered this module in 2015/07, and all the jumpers were set so that it just worked with a Taranis (including RSSI telemetry). So there was no need to open it or adjust any jumpers -- merlin | ||
|
|
||
| # Interference with Taranis Electronics | ||
| Be advised that sending 800mW through some antennas like a dipole or a moxon, **will send enough RF back to your transmitter to confuse some analog channels. As a result, you will see S1, S2, and S3 values jump inexplicably**. | ||
| You can try covering your Taranis with aluminum foil shielding, or use a small antenna extension to move the antenna farther away from your Taranis. | ||
|
|
||
| # Internal jumper settings | ||
| 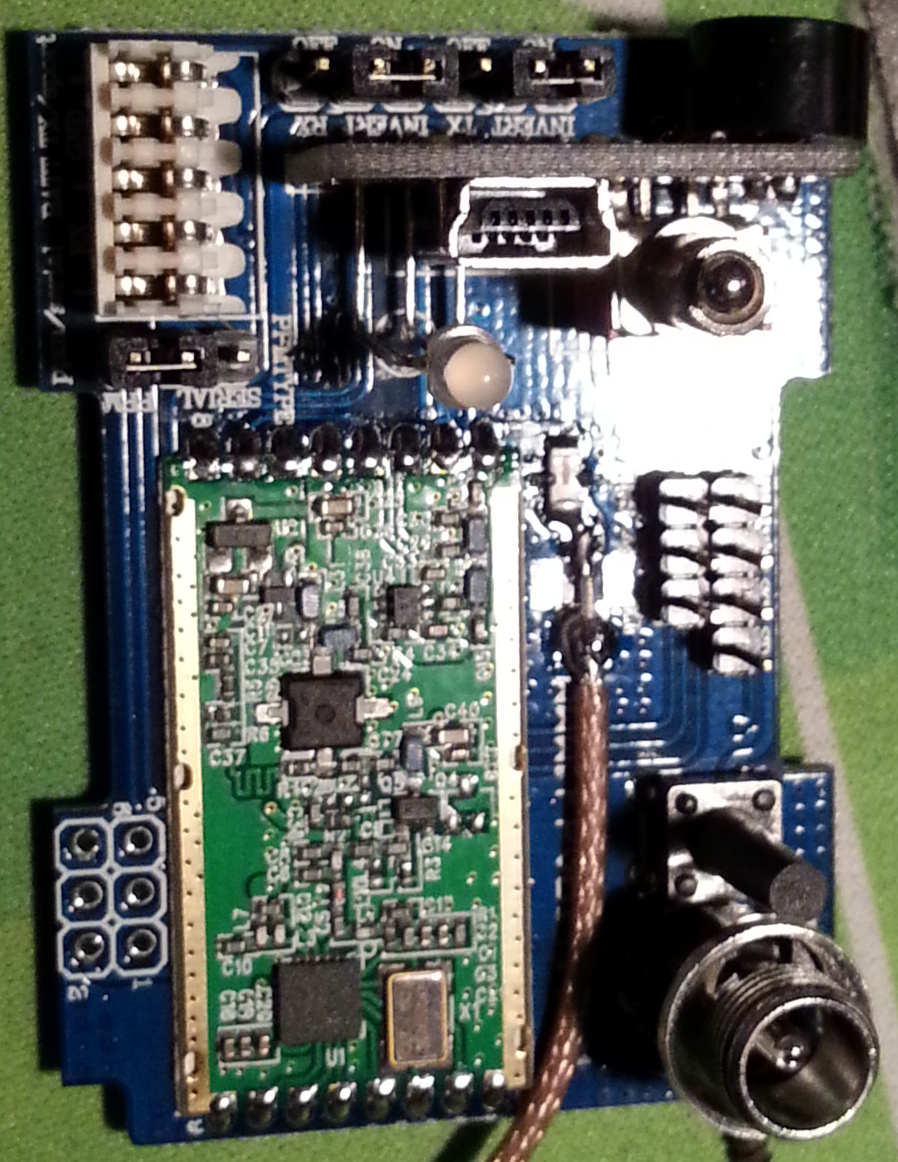 | ||
| ## Invert TX:ON|OFF (Default ON) | ||
| This controls if the serial TX line is inverted or not. Should be set to "ON" for Frsky Taranis to allow telemetry operation. May need to be set depending on Telemetry mods on your TX unit. | ||
|
|
||
| ## INVERT RX:ON|OFF (Default ON) | ||
| This controls if the serial RX line is inverted. May need to be set depending on Telemetry mods on your TX unit. | ||
|
|
||
| ## PPM Type:PPM|SERIAL (Default PPM) | ||
| This controls where the 'pin 1' from the TX is connected to. For transmitters outputting PPM set to PPM. For SUMD/SBUS/Spektrum serial formats set to SERIAL, notably INVERT RX should be set too (SBUS:ON, SUMD/Spektrum OFF). |
Oops, something went wrong.