- Placa de Desarrollo
- LEDs, Botones y Sensores para el uso del usuario
- Descripcion de los Ejercicios
- PRACTICA 1: Uso de Retardos Bloqueantes
- PRACTICA 2: Uso de Retardos NO Bloqueantes
- PRACTICA 3: Modularizacion.
- PRACTICA 4: MEF y Antirebote por soft.
- PRACTICA 5: Manejo de la UART.
- PROYECTO FINAL PDM.
STM32F429I-DISC1 Discovery Development Kit
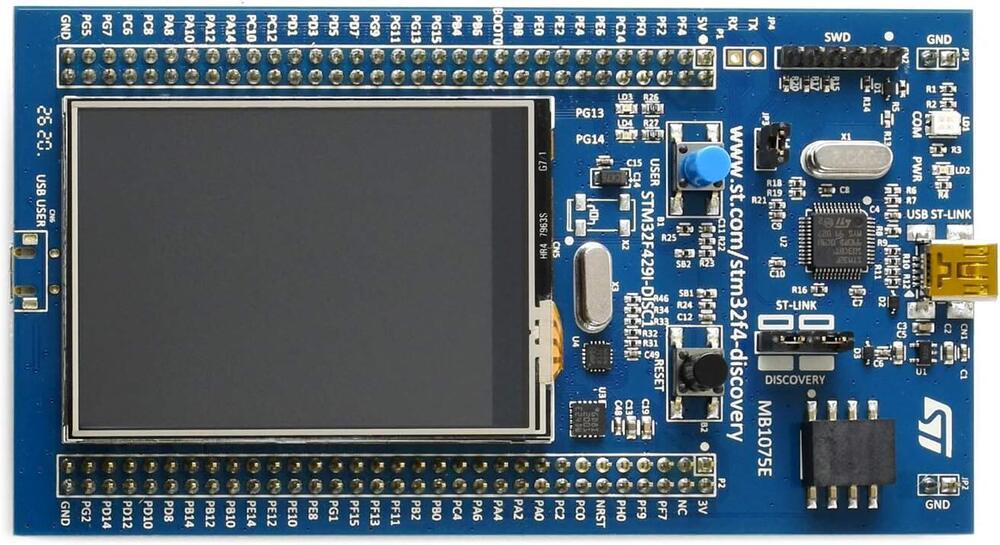
- LEDs
- 1 Ubicado en PG13 (MACRO #define LD3_Pin)
- 1 Ubicado en PG14 (MACRO #define LD4_Pin))
- Boton
- Boton en PA0 (resistencia pull-donw)
Como la placa de desarrollo solo tiene 2 leds, se los hace parpadear a 200ms, y los leds no se prenden simultaneamente.
Definicion de Variables Globales:
uint16_t Leds[ ] = {LD3_Pin, LD4_Pin}; //Arreglo de LEDs se usan macros para cada uno
uint8_t Pos = 0; //Variable para la posicion del array
uint32_t Flicker = 200; // valor del parpadeo
Rutina del super loop:
while (1)
{
if (Pos < (sizeof(Leds)/2)) {
HAL_GPIO_WritePin(GPIOG, Leds[Pos], GPIO_PIN_SET);
HAL_Delay(Flicker);
HAL_GPIO_WritePin(GPIOG, Leds[Pos], GPIO_PIN_RESET);
Pos++;
} else {
Pos = 0;
}
}
Usamos una interrupcion internar para alternar el led que debe parpadear, usamos el pulsado en el puerto PA0 que tiene una resistencia de pull-down, cada vez que precionamos el boton se llama la interrupcion que incrementa o vuelve a cero el valor de Pos del led seleccionado.
Definicion de Variables Globales:
uint16_t Leds[ ] = {LD3_Pin, LD4_Pin}; //Arreglo de LEDs se usan macros para cada uno
uint8_t Pos = 0; //Variable para la posicion del array
uint32_t Flicker = 200; // valor del parpadeo
Rutina del super loop: se encargar de cambiar el estado de led que este seleccionado
while (1)
{
HAL_GPIO_TogglePin(GPIOG, Leds[Pos]);
HAL_Delay(Flicker);
}
Rutina de Interrupcion:
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
//apagamos todos los led antes de cambiar la posicion
for (int var = 0; var < (sizeof(Leds)/2); ++var) {
HAL_GPIO_WritePin(GPIOG, Leds[var], GPIO_PIN_RESET);
}
//cambiamos la poscicion (la aumentamos o volvemos a 0)
if (Pos<((sizeof(Leds)/2)-1)) {
++Pos;
} else {
Pos = 0;
}
}
Consitia en generar funciones para trabajar con delays no bloqueantes, en la parte de aplicarlas para hacer parpadear un led y en la ultima parte poder usar un array para tener valorios delays disponibles.
En el archivo main.c se definio lo necesario para implemetar todo pasando por Includes, Typedef, Macros y Variables Privadas.
//Includes Privados
#include <stdint.h>
#include <stdbool.h>
//Typedef Privados
typedef uint32_t tick_t;
typedef bool bool_t;
typedef struct {
tick_t startTime;
tick_t duration;
bool_t running;
} delay_t;
Macros Privados
#define ciclosdeseados 10 //5 de encendido y 5 de apagado.
//Variables Privadas
delay_t retardo; //estructura del delay
tick_t duracion[] = {1000, 200, 100}; // diferentes duraciones en un array
uint8_t posd = 0; // indice del vector de arriba
uint8_t ciclo = 0; // candidad de encendidos + apagado realizados
Los prototipos de funciones se escribieron:
//Inicializa el contador con los parametros pasados
void delayInit( delay_t* delay, tick_t duration ){
delay->duration = duration;
delay->running = false;
delay->startTime = HAL_GetTick();
};
//Revisa el valor del flag para saber si se cumplio el retardo
bool_t delayRead( delay_t* delay ){
if ((HAL_GetTick() - delay->startTime) <= delay->duration) {
delay->running = false;
}else{
delay->running = true;
}
return delay->running;
}
//nodifica la duracion del retardo.
void delayWrite( delay_t * delay, tick_t duration ){
delay->duration = duration;
delay->running = false;
delay->startTime = HAL_GetTick();
};
Modulariacion del ejercicio anterior fomando la carpeta API donde se crean la sub-carpetas Src y Inc con lo archivos API_delay.h y API_delay.c respectivamente.

Dentro de carpeta Practica 4 STM32F429 se encuentran en dos carpetas separadas el ejercicio 1 y 2 de la guia.

El ejercicio consistia en la utilizacion del periferico UART para mostrar mensajes en una terminal serie, el punto 1 y 2 estan implementados sobre el mismo ejercio. La placa utilizada tiene conectado el STLINK la USART1 implementada en los puerto PA9 y PA10.
El ejercicio imprime en la terminal cada vez que el led fue precionado y cambia la velocidad del parpadeo

Consiste en un sistema de control de temperatura, la misma debe mostrarse sobre una pantalla LCD, según su valor el sistema puede encontrarse en tres estados (Estable, Precaución y Peligro).
El sistema debe actuar en consecuencia al estado en que se encuentra: Estable: Debe presentar la temp en el display, FAN OFF y ALARM OFF Precaución: Debe presentar la temp en el display, FAN ON y ALARM OFF Peligro: Debe presentar la temp en el display, FAN ON y ALARM ON