Sending random points continuously for Turtlebot3 move_base/goals on predefined area
- ROS Noetic
- [Turtlebot3 PC Setup](https://emanual.robotis.com/docs/en/platform/turtlebot3/quick-start/#pc-setup)
$sudo apt-get install ros-kinetic-joy ros-kinetic-teleop-twist-joy \
ros-kinetic-teleop-twist-keyboard ros-kinetic-laser-proc \
ros-kinetic-rgbd-launch ros-kinetic-depthimage-to-laserscan \
ros-kinetic-rosserial-arduino ros-kinetic-rosserial-python \
ros-kinetic-rosserial-server ros-kinetic-rosserial-client \
ros-kinetic-rosserial-msgs ros-kinetic-amcl ros-kinetic-map-server \
ros-kinetic-move-base ros-kinetic-urdf ros-kinetic-xacro \
ros-kinetic-compressed-image-transport ros-kinetic-rqt* \
ros-kinetic-gmapping ros-kinetic-navigation ros-kinetic-interactive-markers
$sudo apt install ros-noetic-dynamixel-sdk
$sudo apt install ros-noetic-turtlebot3-msgs
$sudo apt install ros-noetic-turtlebot3$cd ~/catkin_ws/src
$git clone https://github.com/hansenmaster/send_move_base_goals.git
$cd ..
$catkin_make
$source devel/setup.bashMove base is a navigation stack package on ROS that receive predefined map by SLAM, robot information (transform, odometry, sensor reading), and goals to output /cmd_vel topics and costmap. On real robot, the cmd_vel will be converted by its controller using the SDK.
Subscribe to:
- /map (occupancy grid by SLAM)
- /tf /odom /scan (robot information and sensors reading)
- /move_base_simple/goals (goals for navigation)
- The contribution of this repository is to continously sends /move_base_simple/goals by sending action. The SLAM map and all navigation stack are available from the Turtlebot3 repository.
- A bash script of auto pose initialization is also on the initial_pose.sh
- The package is based on https://github.com/FiorellaSibona/turtlebot3_nav/tree/devel/catkin_ws/src/simple_navigation_goals . Instead of doing patrol on predefined points, I made random points to showcase that move_base really works autonomously while doing obstacle avoidance.
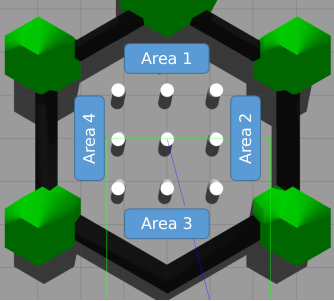 The code will pick random area 1-4, then pick random coordinate inside the area.
The goals generation is repeated forever for each time action is finished means the current target is reached.
The code will pick random area 1-4, then pick random coordinate inside the area.
The goals generation is repeated forever for each time action is finished means the current target is reached.

$export TURTLEBOT3_MODEL=burger
$roslaunch turtlebot3_gazebo turtlebot3_world.launch$export TURTLEBOT3_MODEL=burger
$roslaunch turtlebot3_navigation turtlebot3_navigation.launch map_file:=$HOME/map.yaml %sh initial_pose.sh This code is simply pub topic once at the spawn position of Gazebo world simulation. Then do rotation for 3 seconds to reduce the particle variance.

$roscd send_move_base_goals/scripts/
$chmod +x move_base_forever$roslaunch send_move_base_goals movebase_continuous.launchvideo.mp4
https://github.com/FiorellaSibona/turtlebot3_nav/tree/devel/catkin_ws/src/simple_navigation_goals