diff --git a/Basic-functions-guide.md b/Basic-functions-guide.md
new file mode 100644
index 0000000..c2f24be
--- /dev/null
+++ b/Basic-functions-guide.md
@@ -0,0 +1,51 @@
+An overview of openLRSng functions that do not require being connected to a computer.
+
+Binding
+-------
+Hold down the bind button while connecting power to the transmitter. Once the transmitter beeps once, release
+the bind button. The transmitter will begin to beep 5 times per second and the red LED will flash. The transmitter is now in bind mode, using the stored bind information.
+
+Connect your receiver to power. After a moment, both the red and green LEDs should stay lit constantly and
+the transmitter will stop beeping. The receiver is now bound and all binding and transmitter information has been sent to the receiver. To bind additional receivers without restarting the transmitter, press the bind button momentarily and the transmitter will begin to beep again.
+
+There are three bind modes:
+
+- Release button after 1st beep ( hold for < 5 seconds )
+- Regular bind mode.
+
+- Release button while beeping rapidly ( hold for 5 - 10 seconds )
+- Randomize the TX unique code and hop channels. This makes your TX unique but keeps settings related to telemetry etc.
+
+- Release button while TX is emitting solid tone ( hold for 10+ seconds )
+- Switches the active profile. There are four profile slots and the active profile is indicated by the short beeps on startup. Since this is painful to do if you need to rotate 3 times, you can also use the flip switch to change profiles at startup time if you have one on your transmitter.
+
+
+Randomizing
+-----------
+Hold down the bind button while connecting power to the transmitter. Continue holding down the bind button
+for about 5 seconds until the transmitter begins to beep slowly, then release the bind button. The transmitter will begin to beep 5 times per second and the red LED will flash. The transmitter is now in bind mode, and has randomized the binding data, making your transmitter’s ID unique. Bind your receivers as normal. All receivers previously bound with this transmitter will have to be re-bound.
+
+Setting failsafe
+----------------
+Failsafe information is stored in the eeprom of each receiver. If failsafe information has not been set, the
+receiver’s behaviour is to keep outputting the last information it received. If the RX stops getting information from the TX for a set duration the failsafe servo positions are loaded.
+
+To set failsafe controls to a specific position, turn on a bound transmitter and receiver pair, hold the controls in the failsafe position, and hold down the bind button until the transmitter beeps and the red LED flashes on both the receiver and transmitter. Failsafe information is now set. Always test failsafe operation BEFORE you need to rely on it.
+
+OpenLRSng also supports per-channel failsafe settings (hold last value or set to a specific value) as well as stop-ppm and stop-pwm, that can be enabled after a specified delay i.e. in a staged failsafe setup. These are all set through the RX settings menu and are saved to the RX's memory.
+
+Transmitter profiles
+--------------------
+The TX module has four separate 'slots' for settings which are completely isolated from each other and thus can have completely different setups. The profile can be swapped without any extra tools by keeping the 'bind' button down during TX startup more than ~10s. This can be used to have a profile with telemetry and another one without telemetry or to create a range testing mode with lower TX power.
+Note that binding is also specific to a given profile, so if you have 2 receivers, you could either bind your TX to both at once and never fly them at the same time which usually is the case anyway, or you can use profile to bind one receiver to each profile and switch profiles at runtime.
+
+While switching profiles by holding the bind button for 10 seconds is cumbersome, you can also switch profiles with the mode switch. Once the transmission starts, that same switch can then be used for powerboost if you selected that option in the configurator.
+
+LED information
+---------------
+
+- Transmitter
+- The green LED will flash constantly under normal operation. The red LED will illuminate to indicate a loss of signal from the controller, a lost packet from the receiver (if telemetry is enabled), a problem with the radio, or when failsafe information is set.
+- Receiver
+- The green LED will flash constantly under normal operation. The red LED will illuminate to indicate a loss of signal from the transmitter, a problem with the radio, or when failsafe information is set.
+
\ No newline at end of file
diff --git a/Building-OpenLRSng.md b/Building-OpenLRSng.md
new file mode 100644
index 0000000..b2aac63
--- /dev/null
+++ b/Building-OpenLRSng.md
@@ -0,0 +1,5 @@
+Currently supported:
+
+Arduino 1.0.x
+
+Makefile included for use with above arduino version installed in /usr/share/arduino
\ No newline at end of file
diff --git a/Building-with-PlatformIO.md b/Building-with-PlatformIO.md
new file mode 100644
index 0000000..f479c6a
--- /dev/null
+++ b/Building-with-PlatformIO.md
@@ -0,0 +1,37 @@
+## Installation
+
+### Install Visual Studio Code
+
+https://github.com/Microsoft/vscode
+
+### Install the PlatformIO extension
+Click on `View` > `Command Palette...`
+
+
+
+Find and click on `Extensions: Install Extensions`
+
+
+
+Type `platformio` into the search box and click on `Install` under `PlatformIO IDE`.
+
+
+
+## Usage
+
+### 1. Open the OpenLRSng folder
+Click on `File` > `Open Folder...`
+
+
+
+This brings up the `Open Folder` dialog. Select the folder that has the `platformio.ini` file in it.
+
+
+
+### 2. Open the PlatformIO Project Activities
+
+Click on the alien icon and select the drop-down menu for the board environment you are building to reveal all actions:
+
+
+
+Firmware will be located at `.pioenvs/BOARD_TYPE_*/firmware.hex`
\ No newline at end of file
diff --git a/Connecting-to-a-computer.md b/Connecting-to-a-computer.md
new file mode 100644
index 0000000..e30cb93
--- /dev/null
+++ b/Connecting-to-a-computer.md
@@ -0,0 +1,39 @@
+Always attach an antenna.
+=========================
+Never power on any receiver or transmitter for any reason without a suitable antenna attached. This includes
+when you are connecting it to a computer for software updates. All receivers are also capable of transmitting.
+
+Connecting a device with on-board USB (DeluxeTX)
+------------------------------------------------
+Simply plug in the USB port to your computer and ensure the correct drivers have been installed. :)
+
+Connecting a device that requires a USB-Serial adapter
+------------------------------------------------------
+**5 volt warning:** The radio modules on all 100mW models are not 5 volt tolerant. If you connect 5 volt power to the programming headers, you may damage the radio module. Only connect a programming cable that provides 3.3 volt power. Fortunately, the other components on the receivers and transmitters are tolerant of 5 volts, and the radio module is replaceable if you damage it.
+
+**Also:** some USB-serial adapters are actually 5 volt when they claim to be 3.3 volt. Sneaky, eh? Verify that the power connection (Vcc) is actually 3.3 volts and not 5 volts _with a voltmeter_ if you are not absolutely sure.
+
+Connect your USB-Serial adapter to the computer and ensure the drivers have installed. Driver installation for USB-serial adapters is outside the scope of this manual but links to drivers for the most popular adapters are at the bottom of this document.
+
+The following connections must be made between the device and USB-Serial adapter:
+* Ground
+* TX
+* RX
+
+If you are flashing the device, an additional pin is required: (optional if simply changing settings)
+* DTR
+
+The device will also require a power connection. Transmitters may be powered by the radio as normal, and receiver may be powered by a BEC on the servo pins as normal. If your USB-serial adapter provides 3.3 volts, you may connect that to the power pin on the programming header instead. (Note that Hawkeye transmitters must be powered by the radio)
+
+Drivers
+-------
+
+**_DeluxeTX:_** This device requires drivers for Arduino Leonardo. The simplest way to install these drivers on Windows is to install the latest version of Arduino which is found [here](http://arduino.cc/en/Main/Software#toc3). Download and install the release appropriate for your platform. At the time of writing, version 1.5.5 Beta is the latest release.
+
+**_CP2102:_** [Manufacturer's driver download page](http://www.silabs.com/products/mcu/pages/usbtouartbridgevcpdrivers.aspx)
+
+_**FTDI:**_ [Manufacturer's driver download page](http://www.ftdichip.com/Drivers/VCP.htm)
+
+### Note: JR and Futaba modules (Non-Deluxe)
+
+These transmitters need to be powered by your radio, as the power supplies on board don't like being powered with your USB-Serial adapter. These modules should be plugged into your radio and the radio switched on in order to program them. For OrangeRX modules it's common to cut a hole in the outer plate exposing the programming pins, so you don't have to unscrew the plate every time.
\ No newline at end of file
diff --git a/Diversity.mediawiki b/Diversity.mediawiki
new file mode 100644
index 0000000..1fd6e6b
--- /dev/null
+++ b/Diversity.mediawiki
@@ -0,0 +1,20 @@
+== DIY with 2 modules ==
+'''NOTE: this feature is experimental and should be used with care'''
+
+1. Set up modules
+* Install custom beta firmware from http://openlrsng.org/beta/ (grab the latest)
+* Use RX configurator to enable SCL and SDA outputs (from pinconfig)
+* Enable the "slave mode" flag on one of the two receivers (the one going to be the slave)
+2. Connecting master and slave
+* Use a 4 pin cable to connect the master and slave receivers.
+ SDA-SDA
+ SCL-SCL
+ GND-GND
+ VCC-VCC or 5V-5V
+3. Bind and configure the system normally. Notably the outputs on the slave are not currently usable.
+
+NOTE: to remove the 'slave mode' flag you need to have the 'force bind' jumpper on the RX to allow it to bind.
+
+== Brotronics Broversity RX ==
+This module has built in diversity with support for 2 antennas out of the box (it also supports a backup lipo ans buzzer for lost model finding).
+You can read more about it here: http://marc.merlins.org/perso/rc/post_2015-11-14_Brotronics-Broversity-RX_-the-Missing-Manual.html
\ No newline at end of file
diff --git a/FAQ---Frequently-Asked-Questions.md b/FAQ---Frequently-Asked-Questions.md
new file mode 100644
index 0000000..5a8b17d
--- /dev/null
+++ b/FAQ---Frequently-Asked-Questions.md
@@ -0,0 +1,42 @@
+# Software topics
+
+# Hardware topics
+## Generic
+## HawkEye Deluxe TX
+### What is the use of the "Serial" port on the bottom of the Deluxe Tx ? and how is it used ?
+The serial port can be used for telemetry or for inputting serial RC protocol such as SBUS/SpektrumSAT/SUMD. In the case of a Taranis, you likely want to use PPM output and keep the serial port for serial passthrough.
+
+### What is the use of the "I2C" port on the bottom of the Deluxe Tx ? and how is it used ?
+This is currently unused, however in future updates this can be used to connect two channel analog joystick (directly) or a I2C sensor for headtracking purposes.
+
+### Where is the schematics of the hawkeye hardware ?
+The hawkeye schematics/board designs are not available via us, however the HawkEye deluxeTX is pretty much exactly same as the DTF-UHF deluxeTX https://github.com/DTFUHF/DTFUHF-1W-Deluxe
+
+### Where is the ports and leds exhaustive description of their functions and meanings of the tx ?
+[[See LED Information at the end of the Basic Functions page|Basic-functions-guide#led-information]]
+
+
+### What it the corresponding emitting power (in watts) of the 0 to 7 levels that can be configured in the chrome configurator ?
+This varies a bit but 5 = ~500mW, 6 = ~600mW, 7= ~800mW. It is not recommended to use power levels 0-4 as they may be unreliable on 1W modules.
+
+### What is the advised way to power the Tx unit : is it sufficient to have the three "GND-BATT-PPM" wire connected to the Taranis external connector or not ?
+Yes, Taranis is able to give adequate power to the unit. The unit has internal DCDC converter and may consume upto around 3W (telemetry off, max power). This is about 250mA at 12V.
+
+## HawkEye 6ch RX
+### What is the purpose of the provided jumper
+The jumper is provided for convenience and may be used to to short ch1-ch2 to enable forced bind, or ch3-ch4 to enable 'spectrum analyzer mode'. By default it is plugged on two GND pins and may be left there or removed.
+
+### What is the RSSI & PWM pin voltage and range ? Is it an analog signal or a PWM rssi ?
+The CH3/RSSI pin can be configured to various modes
+* PWM RSSI (8kHz 0-100% dutycycle) can be converted to 0-3.3V analog by enabling the onboard filter.
+* LBEEP this is a special mode in which audible signal is output from the pin when packets are lost, this can be directly or via simple circuit be connected to FPV vTX
+* normal channel output, any servo channel can be configured (RSSI as servo PWM can be achieved using the 'RSSI injection feature')
+
+### Is the schematic available
+Directly no, however it is based on DTFUHF 6ch https://github.com/DTFUHF/DTFUHF-6ch
+
+## Hawkeye 9ch RX
+### What is the RSSI & PWM pin voltage and range ? Is it an analog signal or a PWM rssi ?
+See 6ch above.
+### What is the PINs mapping of 3-pins rows on the receiver : signal, ground, Voltage ? (which row is what ?)
+From board edge inwards: GND, +5(6)V, signal. [[Hardware Guide|Hardware-Guide]]
diff --git a/Flashing-Guide.md b/Flashing-Guide.md
new file mode 100644
index 0000000..8f95cd3
--- /dev/null
+++ b/Flashing-Guide.md
@@ -0,0 +1,27 @@
+1. Connect your device to the computer as shown in the ["Connecting to a computer guide"](Connecting-to-a-computer). Find the COM-port associated with the device.
+
+2. Open cTn's configurator for Google Chrome [(download it here)](http://goo.gl/iX7dJx) and select the COM-port from the menu. If you plugged in your USB-serial adapter after starting the configurator, click refresh to update the list of detected COM-ports, or click Disconnect if the configurator has auto-connected. Don’t click on Connect. Click on Start Firmware Flasher.
+
+3. Select the hardware you are flashing. Note that some receivers can also be flashed with transmitter firmware, allowing them to be used as transmitters with some additional components.
+
+4. Select whether or not to erase eeprom. It is always recommended to leave this enabled unless you know what
+you’re doing.
+
+5. Click the Flash Firmware button. If the flashing was unsuccessful, check to make sure the correct COM-port is selected, the pins have been connected properly (you may have to swap TX and RX, depending on your USB-serial adapter), the LEDs on the receiver are off for the duration of the flashing (indicating that the device is indeed being flashed), and that the device being flashed is being powered properly. Some 1-watt transmitters draw more power than a USB port can give; in this case the transmitter must be powered by a battery while flashing.
+
+## Hardware specific notes
+### Hawkeye 1W JR/Futaba modules
+Easiest method to flash these units is to use 3v3 CP2102/FTDI adapter connected to the (1x6) serial header with following procedure.
+
+1. Plug the module into the radio and connect the serial to it but have it off USB
+
+2. Turn radio on
+
+3. plug in USB to PC
+
+4. unplug the module from the Radio
+
+5. Flash using the configurator
+
+Same procedure can be used when connecing it for configuration.
+For convinience cut a hole on the backside of the module box so that the serial header can be accessed without opening the module.
\ No newline at end of file
diff --git a/Hardware-Guide.md b/Hardware-Guide.md
new file mode 100644
index 0000000..83d00fc
--- /dev/null
+++ b/Hardware-Guide.md
@@ -0,0 +1,46 @@
+General information on hardware
+===============================
+The following hardware is compatible with openLRSng:
+
+* Flytron M2/M3 TX / OrangeRX UHF TX
+* Flytron RX v2 / OrangeRX UHF RX / HawkEye RX
+* openLRSngTX (and its derivatives) / HawkEye TX
+* DTFUHF 4ch RX
+* DTFUHF DeluxeTX
+
+(list incomplete, see [Table of supported hardware](supported-hardware---feature-table)).
+All TX/RXs above are compatible with each other as well.
+
+Note that some RXs can also be used as TXs with some additional hardware setup.
+
+General information on inputs / outputs
+=======================================
+Servo channel outputs
+---------------------
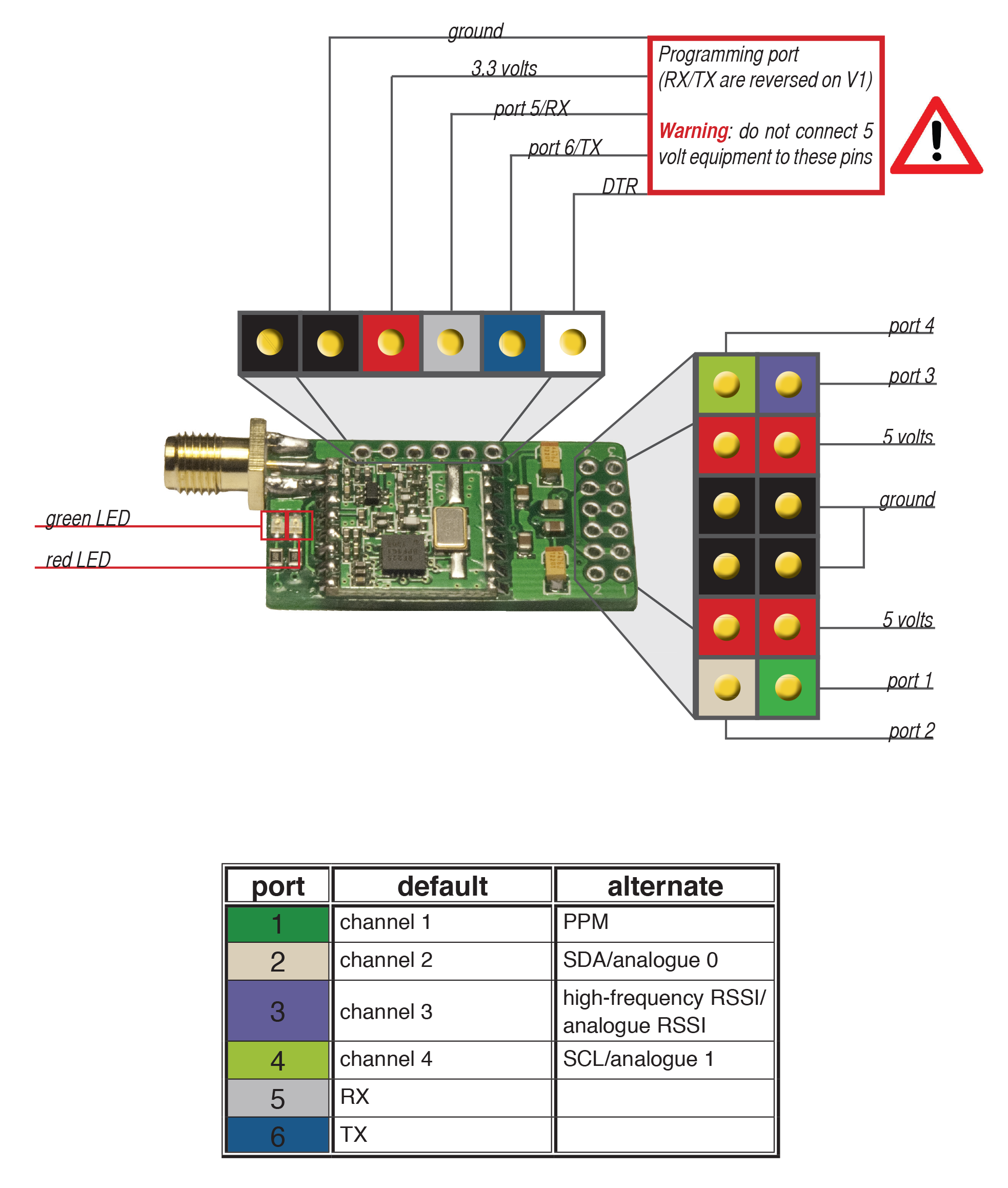
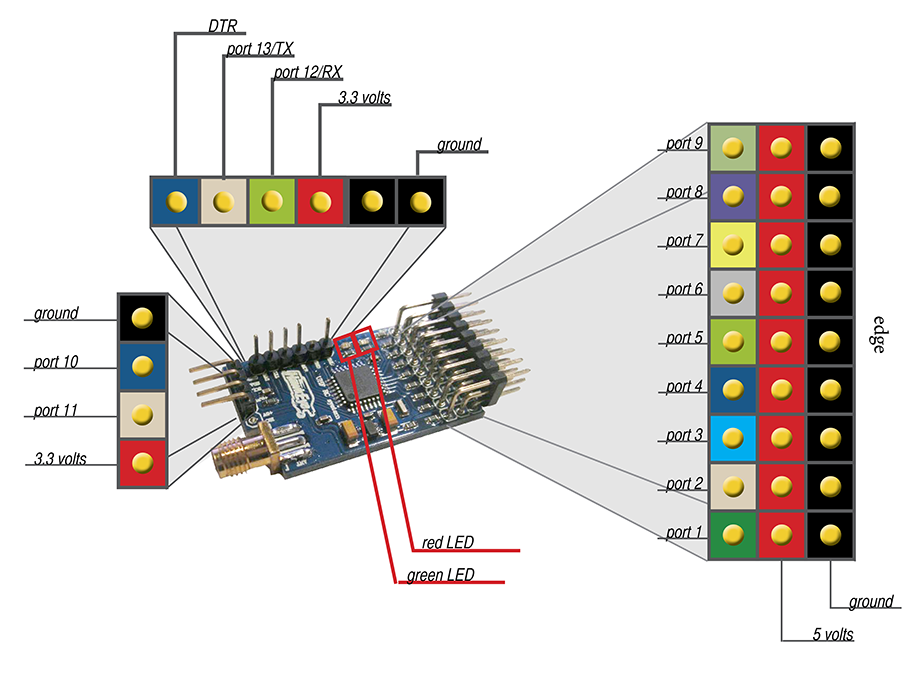
+Servo PWM outputs can be mapped to any port. The DTF UHF 4-channel receiver has 6 such ports and the Hobbyking/Flytron RX has 13 such ports. The "extra" ports are the TX/RX and SDA/SCL pins. RC channels can be reused: for example, you may have RC channel 1 output on two different pins at the same time.
+
+Special outputs
+---------------
+Other port configurations can only be mapped to one pin. These outputs include: High-frequency RSSI and LBEEP; serial TX and RX; i2c signals (SDA and SCL); and PPM. Similarly, analogue inputs can only be enabled on specific pins.
+Receivers
+=========
+
+DTF UHF 4-channel
+-----------------
+
+
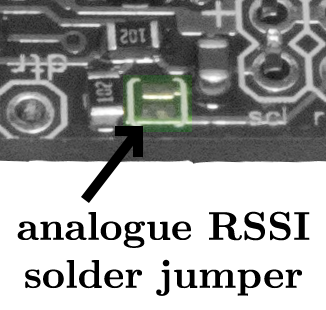
+Version 2 and newer RXs also have the RSSI filter onboard, to filter High-Frequency RSSI into 0-3.3V RSSI. Enable the filter by soldering these two pads together:
+
+
+
+Hawkeye / Hobbyking / Flytron 9-channel
+-----------------------------
+
+
+
+
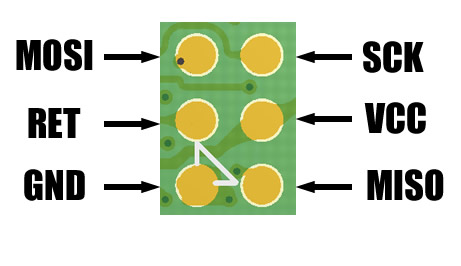
+Note on Hawkeye 6ch/9ch ICSP pins
+---------------------------------
+Hawkeye 6ch/9ch receivers have non-standard ICSP pinout.
+
+
\ No newline at end of file
diff --git a/HawkEye-DTF-UHF-JR-Deluxe-TX-module.md b/HawkEye-DTF-UHF-JR-Deluxe-TX-module.md
new file mode 100644
index 0000000..9a41fb4
--- /dev/null
+++ b/HawkEye-DTF-UHF-JR-Deluxe-TX-module.md
@@ -0,0 +1,22 @@
+# Hardware
+
+They JR module can be fit in the back of a JR compatible radio like the Taranis.
+Currently (on the Taranis) only the PPM mode can be used to communicate between radio and module.
+It is possible to have PPM setup on your TX unit and output a serial format (SBUS/Spektrum/SUMD) on the RX unit.
+
+**Works out of the box for Taranis X9D**: I ordered this module in 2015/07, and all the jumpers were set so that it just worked with a Taranis (including RSSI telemetry). So there was no need to open it or adjust any jumpers -- merlin
+
+# Interference with Taranis Electronics
+Be advised that sending 800mW through some antennas like a dipole or a moxon, **will send enough RF back to your transmitter to confuse some analog channels. As a result, you will see S1, S2, and S3 values jump inexplicably**.
+You can try covering your Taranis with aluminum foil shielding, or use a small antenna extension to move the antenna farther away from your Taranis.
+
+# Internal jumper settings
+
+## Invert TX:ON|OFF (Default ON)
+This controls if the serial TX line is inverted or not. Should be set to "ON" for Frsky Taranis to allow telemetry operation. May need to be set depending on Telemetry mods on your TX unit.
+
+## INVERT RX:ON|OFF (Default ON)
+This controls if the serial RX line is inverted. May need to be set depending on Telemetry mods on your TX unit.
+
+## PPM Type:PPM|SERIAL (Default PPM)
+This controls where the 'pin 1' from the TX is connected to. For transmitters outputting PPM set to PPM. For SUMD/SBUS/Spektrum serial formats set to SERIAL, notably INVERT RX should be set too (SBUS:ON, SUMD/Spektrum OFF).
\ No newline at end of file
diff --git a/Home.md b/Home.md
new file mode 100644
index 0000000..cdf974f
--- /dev/null
+++ b/Home.md
@@ -0,0 +1,42 @@
+**This list is incomplete, please see the pages tab on the right for a full list ->>>>**
+* [General Hardware Information](wiki/Hardware-Guide)
+
+* [Basic functions - binding, failsafe, etc.](wiki/Basic-functions-guide)
+
+* [Connecting hardware to a computer](wiki/Connecting-to-a-computer)
+
+* [How to flash (software updates)](wiki/Flashing-Guide)
+
+* [How to configure settings, and information on settings](wiki/Settings-Guide)
+
+* [Guide to using the Telemetry features (2-way radio)](wiki/Telemetry-guide)
+
+* [Using LBEEP (link loss beep over FPV audio)](wiki/Using-the-LBEEP-feature)
+
+* [Using two RX:s for diversity (EXPERIMENTAL)](wiki/Diversity)
+
+* [Using receivers as transmitters](wiki/Using-Receiver-as-transmitter)
+
+* [Feature comparison of supported hardware](wiki/supported-hardware---feature-table)
+
+* [Note on Spektrum TX compatibility] (wiki/Note-on-Spektrum-transmitter-compatibility-(DX8-DX9-etc.))
+
+* [Building OpenLRSng] (wiki/Building-OpenLRSng)
+
+Important Warnings!!!
+---------------------
+
+The radio modules on all 100mW models are not 5 volt tolerant. If you connect 5 volt power to the programming headers, you may damage the radio module. **Only connect a programming cable that provides 3.3 volt power.** Fortunately, the other components on the receivers and transmitters are tolerant of 5 volts, and the radio module is replaceable if you damage it.
+
+Always attach an antenna.
+-------------------------
+
+Never power on any receiver or transmitter for any reason without a suitable antenna attached. This includes
+when you are connecting it to a computer for software updates. All receivers are also capable of transmitting.
+
+Support
+-------
+Please read all the documentation on this wiki first, and search these threads too. You can post there if you come out empty handed:
+* [[OpenLRS - new firmware fork: openLRSng (rcgroups)|http://www.rcgroups.com/forums/showthread.php?t=1782034]]
+* [[DTF UHF long range receivers & transmitters, using openlrsNG (rcgroups)|http://www.rcgroups.com/forums/showthread.php?t=1911051]]
+* [[OpenLRSng TX/RX from HawkEye (fpvlab)|http://fpvlab.com/forums/showthread.php?22633-OpenLRSng-TX-RX-from-HawkEye]]
\ No newline at end of file
diff --git a/Note-on-Spektrum-transmitter-compatibility-(DX8-DX9-etc.).md b/Note-on-Spektrum-transmitter-compatibility-(DX8-DX9-etc.).md
new file mode 100644
index 0000000..6ff9ffb
--- /dev/null
+++ b/Note-on-Spektrum-transmitter-compatibility-(DX8-DX9-etc.).md
@@ -0,0 +1,10 @@
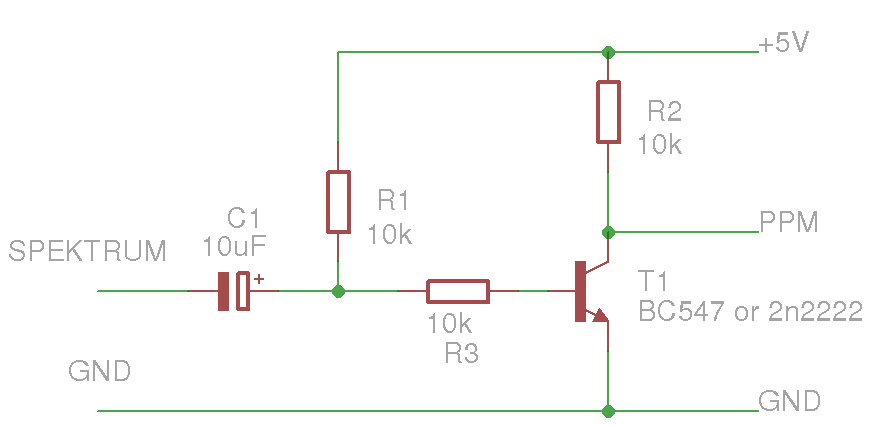
+Some users have reported inability to drive openLRS TX units with trainer signal from Spektrum Transmitters. The problem seems to be limited to 'newer' spektrum radios e.g. DX8/DX9 while DX6 works ok.
+
+We have contacted Spektrum representative to get details on how the trainer signal should be processed to be reliable but they refuse to give this information. In short what they have to say is (direct quote) _**"We do not condone nor support use of long-range systems with our radios**_". I would read this as direct recommendation to use some other manufactures gear for long range purposes (FrSky Taranis is a very good value system and fully supports driving long range transmitters).
+
+That said we are workking on resolving the issues with the affected transmitter so you can continue using the gear you have.
+
+The schematic below has been tested on DX8 and DX9 and works. Please let us know if it works for you too!
+
+
+
diff --git a/OpenRcBus.md b/OpenRcBus.md
new file mode 100644
index 0000000..1111f3d
--- /dev/null
+++ b/OpenRcBus.md
@@ -0,0 +1,58 @@
+# OpenRcBus - work in progress
+
+OpenRcBus is an open and expandable protocol to be used between Transmitter - radiomodule or recevier - flightcontroller.
+
+It will interleave RC control and telemetry inside a single serial link.
+
+## Physical layer
+
+3v3 TTL level serial port at 1M bauds (tbd.)
+
+Bidirectional link if needed, both directions use same frame types.
+
+## High level frame format
+
+ [HEADER]
+ [DATA]
+ [CRC16]
+
+### Header
+
+ [PREFIX] single byte of value '0x??' tbd.
+ [LENGTH] length of data part in bytes [0..255], excludes HEADER and CRC16
+ [DATATYPE] single byte identifying the format of the DATA
+
+#### Datatype values
+ 0x01 12 bit RC channel data (2 channels per 3 bytes)
+ 0x02 Serial telemetry
+
+### Data
+
+#### Data (0x01)
+RC data
+ [FLAGS] - 0x01 -- set failsafe
+ X * ( ch0bits_11_4 | ch0bits_3_0,ch1bits_11_8 | ch1bits_7_0 ) - Channel values (3 bytes per 2 channels)
+
+ nominal 1..2ms channel is mapped to values 1024..3071
+
+ when setting failsafe special values are used for special behavior
+ 0x000 - do not output channel in failsafe
+ 0x3ff - channel outputs last good value on failsafe
+
+#### Serial telemetry (0x02)
+Serial telemetry of one of following formats, first byte gives subtype.
+
+ Subtype values:
+ 0x00 - passthru (transparent data)
+ 0x10 - frsky 'D' telemetry
+ 0x11 - frsky 'smaprtport' telemetry
+ 0x18 - HoTT
+ 0x20 - mavlink
+ ...
+
+### CRC16
+CRC16 value over HEADER and DATA parts. Calculation details tbd.
+
+## WIP
+### mixer sync
+Special frame to inform when new RC data is expected, sent out a fixed time interval e.g. 10ms? before new RC data is needed.
\ No newline at end of file
diff --git a/OrangeRX-TX-module-as-receiver.md b/OrangeRX-TX-module-as-receiver.md
new file mode 100644
index 0000000..dbaba41
--- /dev/null
+++ b/OrangeRX-TX-module-as-receiver.md
@@ -0,0 +1,19 @@
+This page will show how to use 1W OrangeRX TX as receiver allowing ~500mW telemetry.
+
+7 outputs are available (all can be used for servo PWM)
+
+1. buzzer driver transistor 'B' (PPM)
+
+2. PPM IN pin (LBEEP,RSSI)
+
+3. RFOUT pin (LLIND)
+
+4. SDA pin (ANALOG input)
+
+5. SCL pin (ANALOG input)
+
+6. RXD pin (serial RX)
+
+7. TXD pin (serial TX, SUMD, SPEKSAT, SBUS)
+
+
\ No newline at end of file
diff --git a/RSSI-modes.md b/RSSI-modes.md
new file mode 100644
index 0000000..01dae02
--- /dev/null
+++ b/RSSI-modes.md
@@ -0,0 +1,17 @@
+OpenLRSng can output RSSI in a few different forms
+
+* RSSI
+ Pure signal strength, notably this will show zero during packetloss
+
+* Qualilty
+ Pure signal quality, basically success/fail ratio over 15 last packets. For example losing a single packet in air will result in a 6% drop for duration of 15 packets.
+
+* Composite
+ Composite signal is a mix of RSSI and Quality.
+ If quality is maxed (100%) the composite signal is RSSI mapped to 50-100% range. If quality is not 100% the composite output is quality values mapped to 0-50% range.
+
+When RSSI is injected into PWM/PPM/SUMD/SBUS etc. it is also possible to get RSSI and Quality as separate channels, this is the best option if your OSD supports that.
+
+If you can only show one value it is recommended to use the Composite (default) mode as that will give both RSSI and quality information as singe value.
+
+It is recommended to familiarize oneself to the RSSI behavior by testing behavior with dummy load etc.
diff --git a/Settings-Guide.md b/Settings-Guide.md
new file mode 100644
index 0000000..8fe8e51
--- /dev/null
+++ b/Settings-Guide.md
@@ -0,0 +1,184 @@
+How to get into the transmitter settings menu
+---------------------------------------------
+
+1. Start the Google Chrome configurator. [(download it here)](http://goo.gl/iX7dJx)
+
+2. Connect your transmitter to the computer as shown in the ["Connecting to a computer guide"](Connecting-to-a-computer).
+
+3. The configurator should auto-connect to the transmitter and open the settings page.
+
+How to get into the receiver settings menu
+------------------------------------------
+
+Note that RX settings are done wirelessly. Your receiver does not need to be connected to the computer to adjust settings. No PWM or PPM will be output by the RX while in configuration mode.
+
+1. Connect to the transmitter as above and ensure you are in the transmitter settings tab.
+
+2. Click on the RX settings tab. Apply power to the RX during the timeout period. This can be done by applying power as normal to the airplane or helicopter.
+
+3. The configurator should auto-connect to the receiver and open the settings page.
+
+Testing Warning
+---------------
+If you have servos plugged into your receiver and wonder why they aren't moving while you're setting things up with the configurator, this is normal: during configuration, RX signals are visible in the channel viewer on the transmitter, but the receiver doesn't pass them through to its output channels.
+To test, you'll have to unplug USB from your transmitter, reboot it, and also reboot the receiver.
+Well, actually it still won't work because after most setting changes on the transmitter, you'll have to rebind the receiver (hold TX button, power transmitter on, release button, hear fast beep, power receiver on, fast beep stops, power both sides off and back on, and you're in business).
+See the [[Basic-functions-guide]] page for details on how binding works.
+
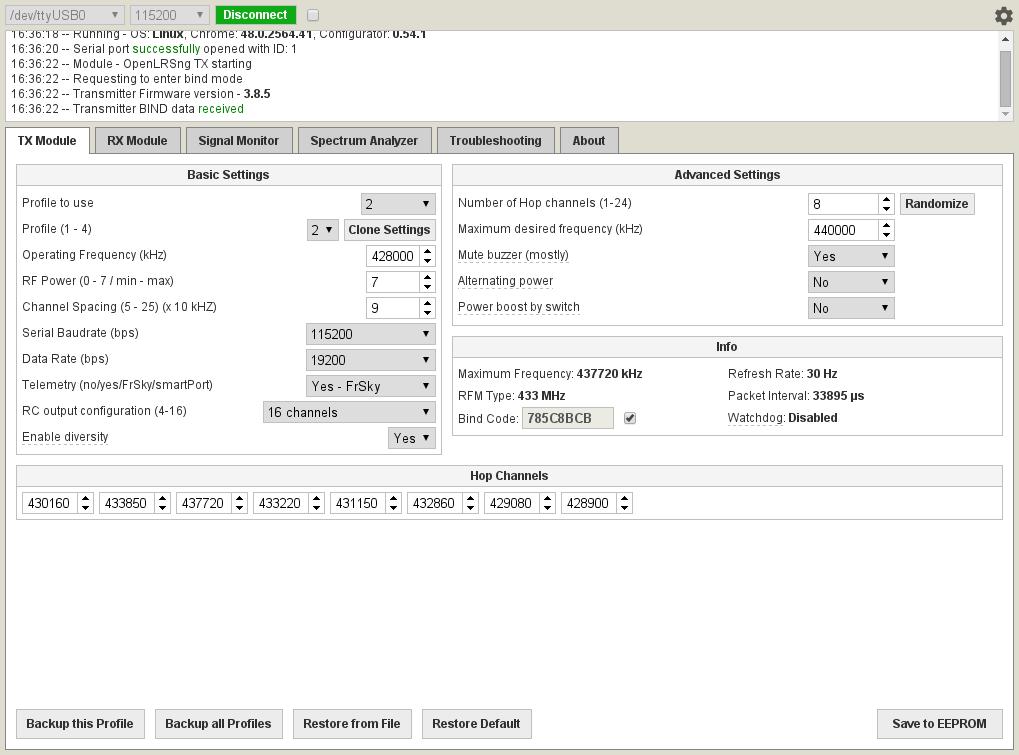
+Transmitter settings
+--------------------
+These settings are set on the transmitter and sent to the receiver during bind. **You must rebind the receiver after changing any of these settings.**
+
+
+
+- RFM Type
+- Select the frequency of the RF module on your device. Most units are 433.
+- Operating frequency
+- The lowest frequency of the frequency range you are transmitting (antennas let you veer away from 433Mhz, but the farther you go, the more you'll be losing range in an exponential fashion).
+- RF Power
+- The output power setting of the transmitter. 0 is the lowest and 7 is the highest. The receiver will use the same power setting if telemetry is enabled. 1W hardware should not be set to a value lower than 5. Power output does not change linearly with this setting.
+
+| Setting | RFM22B(100mW) | RFM23BP(3.3V) | RFM23BP(5V) | RFM23BP(6V) |
+ | 100mW units | Orange/Flytron | Hawkeye/DTF | some DIY |
+| 0 | 1.3mW | N/A | N/A | N/A |
+| 1 | 1.6mW | N/A | N/A | N/A |
+| 2 | 3mW | N/A | N/A | N/A |
+| 3 | 6mW | N/A | N/A | N/A |
+| 4 | 13mW | N/A | N/A | N/A |
+| 5 | 25mW | 350mW | 500mW | 630mW |
+| 6 | 50mW | 450mW | 650mW | 800mW |
+| 7 | 100mW | 600mW | 800mW | 1000mW |
+
+
+- Channel spacing
+- The amount of frequency between each channel. This can be used to get a list of channels between Min and Max desired frequency
+- Serial baudrate
+- The connection speed of the serial link if you are using the transparent serial link. This is only the connection speed, which will depend on the devices that you are connecting to. The rate that data can be sent will probably be much lower.
+- Data rate
+- The rate that data is sent between the transmitter and receiver. Lower numbers mean slightly improved range at the cost of servo refresh rate.
+- Enable telemetry
+- Enable the telemetry link from the receiver. The transmitter will beep if the receiver experiences packet loss. Also, the transparent serial bridge will be available. The FrSky option will enable FrSky telemetry output on the transmitter for connection to OpenTX or FLD-02. The Smartport option only supports telemetry and 2 analog back channels, it works but FrSky is preferable.
+- RC output configuration (channels)
+- Select the number of channels that will be sent to the receiver. This is also the number of channels that will appear on the receiver’s PPM output. Additional channels sent to the transmitter will be ignored. Example: if the transmitter is set to 8 channels, and you controller is set to 12 channels, only the first 8 channels will be sent to the receiver. The “Switch” channels are channels with very low resolution - only 4 positions; however they take 1/5th of the time to transmit, increasing the number of useful channels for a certain refresh rate.
+- Enable Diversity
+- This sends a longer pre-amble and is required if you use a module like the Brotronics Diversity RX
+
+- Number of hop channels
+- This will allow you to set the number of hopping channels. While it's tempting to use 24 for better protection from interference, too many channels mean that it takes longer to re-acquire a lost signal and/or bind. 8 is a good number to start with
+- Maximum desired frequency
+- Set the maximum frequency you want to transmit on. All the hopping channels will be placed below this frequency. Keep in mind again that the farther you get from 433Mhz, the less effective the antennas will become (going 10MHz on either side is ok though)
+- Mute Buzzer
+- As you fly farther away with a 1W TX and a 100mW RX, you will lose your telemetry back channel and the constant beeps from your TX module will become very annoying. This is where you turn them off :)
+- Alternating Power
+- Sends every Nth packet with lower power. This is meant to trigger LBEEPs and warn you that you're pushing your range. If you have a proper RSSI connection back to your OSD, you're unlikely to benefit from this though
+- Power Boost by Switch
+- If you set your RF power to 5 instead of 7, allows the switch to switch to 7 (full power). Unless you know why this is useful to you (like mostly flying short range and wanting to be a good RF citizen), you're likely better off keeping your TX power at 7 and not bother with boost by switch
+
+
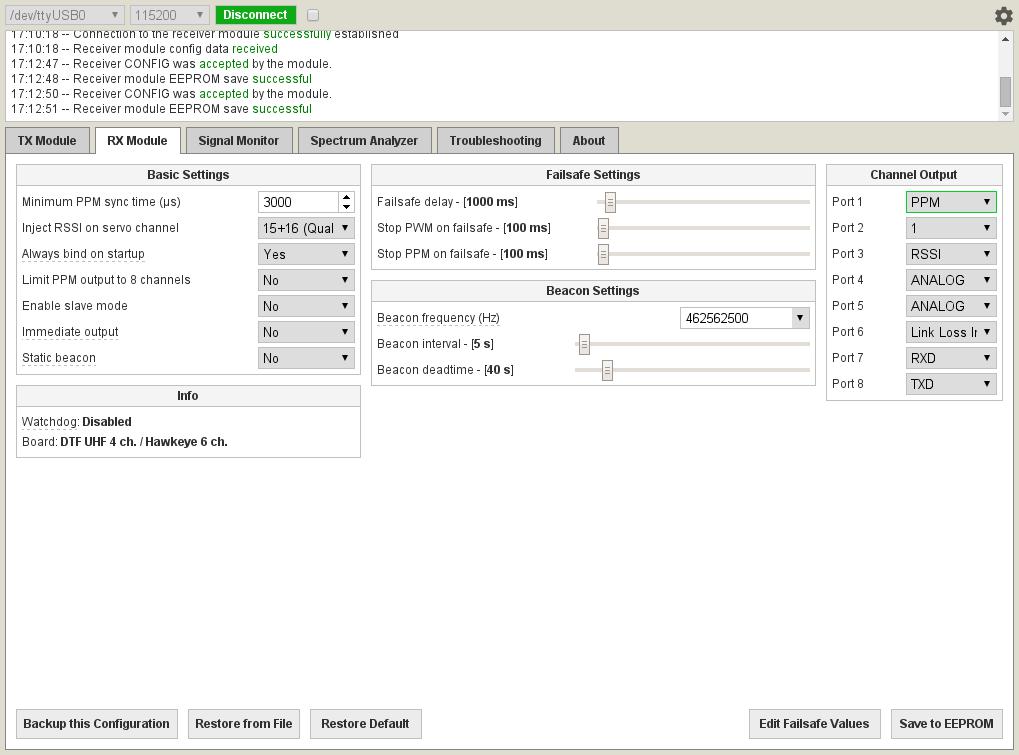
+Receiver Settings
+-----------------
+
+
+
+Receiver settings are set on each individual RX and stored in the RX's memory. The RX will keep these settings until they are changed or erased during a software update.
+
+PPM output is available on one pin. It can be enabled by setting the correct port to output PPM. High-frequency RSSI / LBEEP is also available on one pin and is enabled the same way. See the [Hardware Guide](Hardware-Guide) to find the correct port for your receiver.
+
+
+- Minimum PPM sync time
+- The minimum time between PPM frames on the PPM output. The default value works fine for many systems but fickle systems such as Ardupilot require a longer sync time (ardupilot 3.1 and better works ok with 3000, some older versions apparently want 4200).
+- Inject RSSI on servo channel
+- The RSSI signal is turned into an output that can drive a servo and injected into the PPM stream, replacing the RC channel of your choice. If you are connected to your flight controller via PPM/SBUS/SUMD/etc, you can reuse the existing cable to send RSSI instead of using a different output port on the RX and a 2nd cable, to send RSSI. Ardupilot 3.4 and better support RSSI over PWM (but if you connect via PPM, be careful that AP 3.4 does not currently see any channels past 12). See RSSI at the bottom of this page for more details on the 3 kinds of PWM RSSI.
+- Always bind on startup
+- By default, the receiver always listens for a bind message for a moment when power is applied. If this feature is disabled, you must jumper ports 1 and 2 to force the RX into bind mode on startup.
+- Limit PPM out to 8 channels
+- Some devices that accept PPM are also picky about the number of PPM channels that are in a PPM frame. This option is used to only output the first 8 channels in the PPM stream regardless of the number of channels sent to the receiver.
-
+
- Enable slave mode
+- This option is for a future multi-RX diversity mode. Don't use it for now.
+- Enable slave mode
+- This option is for a future multi-RX diversity mode. Don't use it for now.
+- Immediate output
+- start outputting ppm/pwm using failsafe values befoero it gets first packet from tx. Unless you know you need this, this is probably not what you want (especially if it gives you partial motor power)
+- static beacon
+- By default, the 5 tone beacon that is sent after you lose signal has decreasing power output (useful to know that as you get closer, you start hearing more of the 5 tones). This setting disables that. Unless you know why you ned this, you probably don't want to enable it
+
+- Failsafe delay
+- The amount of time after the last packet is received before the receiver will load failsafe values. This can be used to “fly through failsafes” and can be adjusted to your liking. This value is in 1/10ths of a second.
+- Stop PWM on failsafe
+- Completely disable PWM outputs on failsafe.
+- Stop PPM on failsafe
+- Completely disable PPM outputs on failsafe.
+- Beacon frequency
+- If this option is enabled a tone is transmitted on the selected frequency that can be picked up using a common FRS, PMR or amateur radio walkie-talkie to aid finding a lost airplane or helicopter. Five tones are sent of descending transmit power to help you zero in on its location. The beacon is sent after failsafe has been activated.
+- Beacon interval
+- The amount of time the beacon will idle between transmit sequences.
+- Beacon deadtime
+- The amount of time after failsafe has been enabled before the beacon starts.
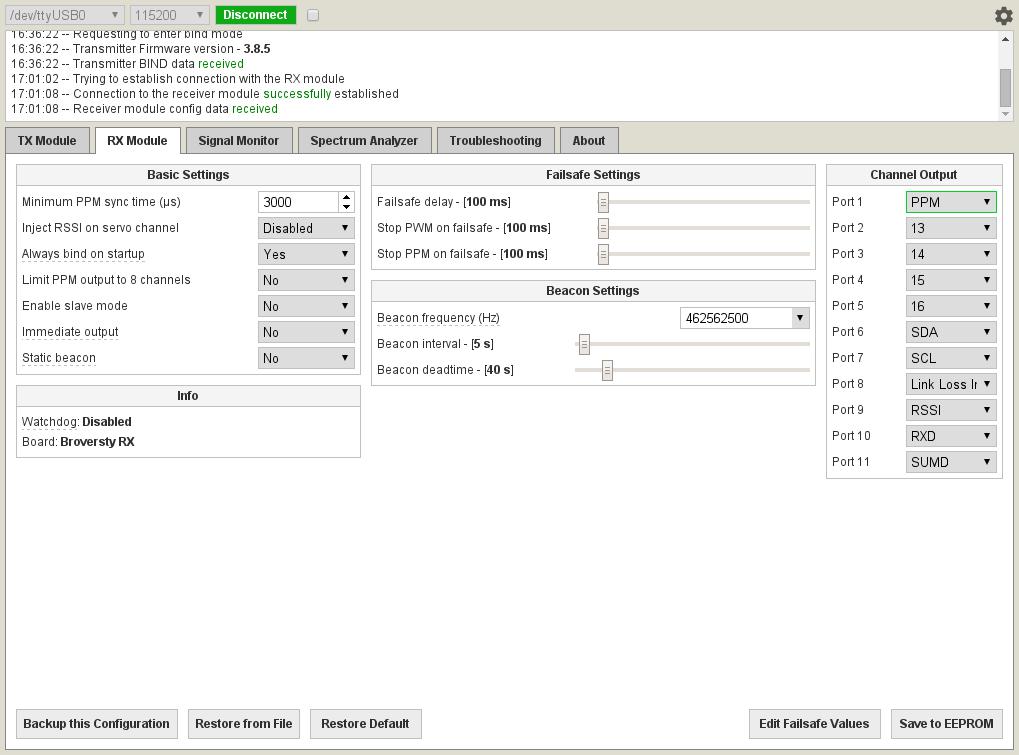
+- Channel Output
+- Set the outputs for each port in this menu.
+
+
+Channel Output options
+----------------------
+### List of pin mapping options:
+As you'll likely see what's available on each pin depends on the pin and what RX hardware you have.
+Here are the available options:
+* 1-16: Unmodified analog signal from TX
+* S1-S16: send 0 or 3.3V depending on TX position (useful to activate a buzzer, LEDs, or other on/off devices)
+* SDA/SCL: experimental, currently only used for diversity with 2 modules.
+* Analog: selecting 2 ports as analog sends back their 0-3.3V value as analog channels that can be received by the TX
+* link loss indicator: turns on if link is totally lost (useful for a buzzer)
+* packet loss beeper: same thing but sends signal for each packet lost (early warning). Because this is shared with the pin that can do RSSI, you'll likely want RSSI if your OSD/flight controller supports it
+* RSSI: digital or analog RSSI output (see below). Not needed if you are using inject RSSI on servo channel.
+
+### Selecting protocol to output combined channels to your flight controller:
+If you want to read about all these protocols, see: http://blog.oscarliang.net/pwm-ppm-sbus-dsm2-dsmx-sumd-difference/
+PPM is the basic option. But if you want 16 channels on ardupilot or your flight controller doesn't support CPPM/PPMSum, you have more options, however they unfortunately take over the pin that does Serial TX and they also change the baud rate of the single UART in the module, which will affect the speed of the RX pin in the other direction. In other words, if you want to serial passthrough, you will want to stick with PPM.
+
+Here's the list:
+##### CPPM/PPM/PPMSum on port 1
+This works in most cases (up to 12 channels if you use ardupilot, see https://github.com/diydrones/ardupilot/issues/3337 ). This is your simplest option if supported, and does not take
+your TX pin like the other options
+
+##### SBUS
+On most hardware, this is actually inverted SBUS because a normal UART cannot output real SBUS. If you are using ardupilot and want 16 channels, don't bother with inverted SBUS and try SUMD instead. But if you need SBUS, see this page to make an inverter: http://www.rcgroups.com/forums/showthread.php?t=1459431&page=2 and https://groups.google.com/forum/#!msg/px4users/gUE6mPISvKA/aiaC6XwvJckJ . If you are lucky to have an RX module like the Broversity RX, port 11 is mapped to the TX pin, and the SBUS pin inverted, so you actually get real working SBUS (which requires hardware inverted serial) that can be plugged directly into a pixhawk. **Also note that SBUS is not scaled the same, so your endpoints will be different than with other protocols** (see http://www.rcgroups.com/forums/showpost.php?p=33100808&postcount=8082)
+
+##### Spektrum
+Spektrum satellite input. This plugs into a pixhawk sbus input, however you should only wire the Signal (1) and Ground (2) pins, and wire the red wire (5V) to a servo output on your pixhawk (the spektrum input Pin3 only gives 3.3V). Wiring of the spektrum plug on pixhawk is Signal/Gnd/3.3V (from left to right) with writing pointing up
+
+##### SUMD
+It's a better protocol than Spektrum and supports 16 channels natively instead of 7+7 (14) in alternating frames for Spektrum. Ardupilot supports SUMD on the Spektrum port, so you should use this. Again, only wire Pin1 (signal), Pin2 (Ground) on the spektrum plug, and route the Vcc wire to a 5V output on the pixhawk (SBUS port, or servo output). This is your best protocol that passes through 16 channels to a pixhawk if you can't use SBUS with an inverter (built in, or not)
+
+### Example pin mapping for Hawkeye 6 Channel:
+* 1: (C)PPM / PPMSum
+* 2: SDA/analog
+* 3: RSSI / packet loss beeper
+* 4: SCL/analog
+* 5: analog
+* 6: Analog / link loss indicator
+* 7: RXD
+* 8: TXD / Spektrum / Inverted SBUS / SUMD
+
+
+RSSI modes
+----------
+There are 3 different RSSI modes available in openLRSng:
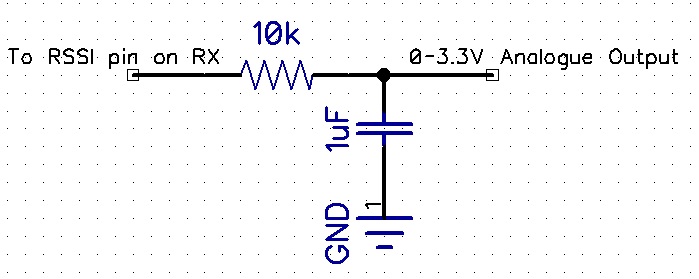
+#### Digital or Analogue RSSI 0-3.3 volts
+Some modules only output digital RSSI, so the high-frequency signal should be filtered to produce an analogue signal which is expected by most OSDs/flight controllers. Some modules have an on board jumper you need to solder to output analog RSSI directly without need for an external filter (on DTF UHF 4-channel receivers V2 and newer, the filter is on-board and can be enabled by soldering a jumper as seen in the Hardware Guide). An external filter can be made with a capacitor and resistor.
+
+
+#### LBEEP Audio Beep mode/packet lost beeper, or link loss beeper
+This will output a beep on a lost radio packet that continues until a valid packet is received. This output can be connected directly to the audio input of a video transmitter. Thus, instant audio feedback of the radio link quality is enabled. You can also use a link loss beeper output instead which will only turn on after link has been fully lost.
+[Using LBEEP (link loss beep over FPV audio)](wiki/Using-the-LBEEP-feature)
+
+#### RSSI Injection
+A RC servo channel can be replaced with RSSI information, and set to an output port to drive a servo or OSD with 50Hz servo-pwm. Note that this injection will replace that servo channel, or you can map this to an additional RC channel not used by your servos and not overwrite a PPM channel you are using. RSSI as a PWM channel is supported by Ardupilot 3.4 and above, but it does not seem to support reading any channels past 12 when you use PPM output, so don't use channels past 12 unless you're using SUMD or SBUS.
+
+You can select 4 kinds of RSSI injection:
+* RSSI: normal RSSI
+* Qual: link quality, success rate of last 15 packets
+* Comp: mix of rssi+qual
+* Qual on port X, and RSSI on port X+1
+Whether it makes sense to have Qual + RSSI (using 2 channels) or Comp (using one channel) is for you to find out :)
+
+If you're curious, you can see the list of options available here: https://github.com/openLRSng/openLRSng-configurator/blob/master/tabs/rx_module.html
\ No newline at end of file
diff --git a/Telemetry-guide.md b/Telemetry-guide.md
new file mode 100644
index 0000000..d13f112
--- /dev/null
+++ b/Telemetry-guide.md
@@ -0,0 +1,56 @@
+This page is incomplete. Please have a look at these pages for more details:
+* http://flyingforfun.weebly.com/open-lrs.html
+* https://hackpad.com/ep/pad/static/zpJZqq8H2Qq
+* http://diydrones.com/forum/topics/mavlink-ardupilot-opentx-extension
+* http://www.rcgroups.com/forums/showthread.php?t=1913501
+* If you care about mavlink on openlrs, you can also look at UltimateLRS (Orange only as of 2015/12): http://www.itluxembourg.lu/site/ https://vimeo.com/133086385 https://vimeo.com/137746307
+
+# Notes
+## Asymmetric linkpower (1W TX vs 100mW RX)
+When 1W TX module is used with 100mW RXs the range for telemetry is limited by the 100mW power of the RX. As TX side has more power (5 - 10 times) there is fairly large window where control is not affected while telemetry is totally lost.
+
+## Serial protocols using the same serial port
+**You cannot use SBUS, Spektrum or SUMD and use serial telemetry at the same time**:
+When SBUS, Spektrum or SUMD is assigned as a pin output, the serial port (RX pinout) used for receiving telemetry data will be set to the baudrate of the serial protocol that is used. For Spektrum and SUMD this is 115200 baud and for SBUS this is 100000 baud.
+This effectively means that the FrSky D and Smartport with a baud rate of 9600 and 57600 respectively will affect serial passthrough (but basic telemetry for RSSI and passing on analog A1/A2 will work with both FrSky D and Smartport).
+
+# Telemetry modes
+
+## Passthru
+In this mode data inputted on the serial port on TX is outputted on RX and vice versa. It should be noted that the amount of data passed thru is limited by the radiolink, if the radiolink capacity is exceeded data will be silently dropped. Approximate speed that data can be passed thru can be caluculated from refresh rate as it is possible to pass 8 bytes of data in each telemetry packet from RX to TX, TX->RX rate is half of that since every other packet is used by servo values.
+
+## Smartport
+This mode is compatible with FrSky Taranis, currently it only supports RSSI and two analog sensors from RX (setup one port as SDA, one as SCL and they will be your 2 analog values you can input on the line wire. Be careful not to exceed 3.3V (or 5V depending on your module)).
+It should be noted that FrSky uses inverted serial levels and thus a inverter may be needed between openLRSng module and Taranis (not true with "DTF UHF 1-watt Deluxe TX JR Module" which is already inverted by default, and just works). Kha also says at http://www.rcgroups.com/forums/showpost.php?p=33375743&postcount=1732 that "Smartport is not that complete for now" (2015/12). Try the FrSky protocol instead if you don't need Smartport.
+Selecting 2 output ports as ANALOG does send their value to A1 and A2 in the Frsky telemetry page (but this doesn't work on a Broversity RX module where SDA and SCL ought to be usable as analog input)
+
+## FrSky
+In this mode openLRSng emulates the behaviour of FrSky two way system (DxR-x). It should be noted that FrSky uses inverted serial levels and thus inverters may be needed to convert the serial signal (again "DTF UHF 1-watt Deluxe TX JR Module" is already inverted by default, and just works).
+Frsky supports serial telemetry passthrough and external sensors (sensor hub), so it can pass more data than Smartport support
+To learn the basics on Frsky D telemetry, see: https://www.youtube.com/watch?v=mkHSORoEcAM
+Selecting 2 output ports as ANALOG does send their value to A1 and A2 in the Frsky telemetry page (but this doesn't work on a Broversity RX module where SDA and SCL ought to be usable as analog input)
+
+## Mavlink
+Development work on Mavlink telementry has been made availible in the [gitsly branch](https://github.com/openLRSng/openLRSng/tree/gitsly). Sadly since the openlrsng code now seems frozen in time (2017), it does not look like this branch will ever be merged, but hopefully it should work on its own.
+
+# Connections
+
+New JR modules like [HawkEye Deluxe TX](https://github.com/openLRSng/openLRSngWiki/wiki/HawkEye-JR-Deluxe-TX-module) have a build in inverter both on RX and TX which can be set by jumpers on the board (by default the JR Hawkeye TX module just works, no need to change the jumpers).
+
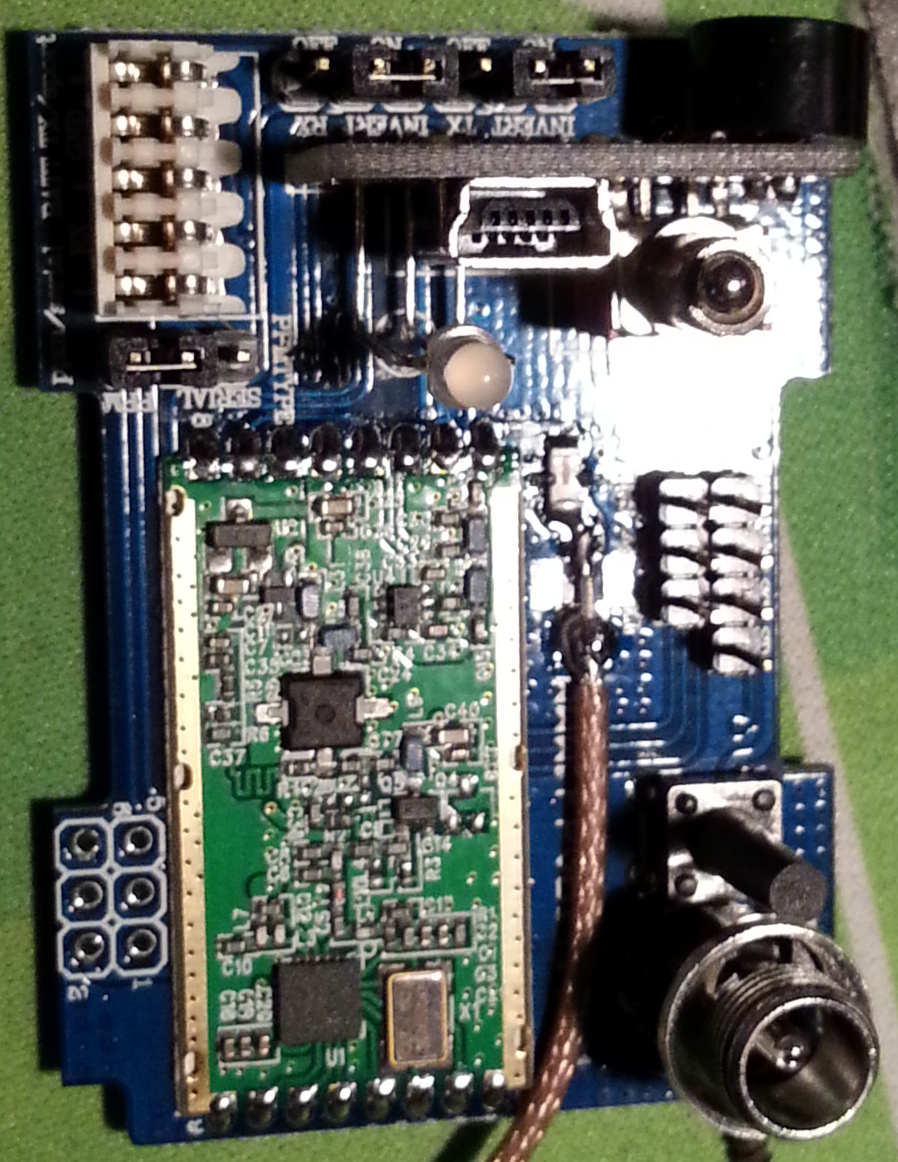
+For other hardware a simple one transistor inverter can be used for converting FrSky & SmartPort signals between:
+* hub/hubless sensors to openLRS RX
+* openLRS TX to FLD02
+* openLRS TX & Taranis
+* etc.
+
+
+
+Transistor can be virtually any small signal NPN, e.g. BC547, 2n2222
+
+# Modification instructions and adapters
+## HawkEye deluxeTX Taranis adapter circuit (adapter wire)
+
+## [Modifying DTF UHF deluxe TX for Taranis](https://www.dropbox.com/s/zl753t5qce8xgt9/DTFUHF_dTX_for_Taranis.pdf) (note, this is for the standalone TX, not the JR TX module which does not need to be modified)
+## [Modifying OrangeRX UHF TX for Taranis](https://www.dropbox.com/s/aw3g0rder8kgcqp/OrangeRX_UHF_TX_Taranis.pdf)
+## [Modifying OrangeRX UHF 1W TX for Taranis](http://www.rcgroups.com/forums/showpost.php?p=26953006&postcount=2802)
+## [Modifying HawkEye 1W for Taranis](https://www.dropbox.com/s/n7oi1bhu5ek2ndv/HawkEye_for_Taranis.pdf)
\ No newline at end of file
diff --git a/Using-Receiver-as-transmitter.md b/Using-Receiver-as-transmitter.md
new file mode 100644
index 0000000..98c7d15
--- /dev/null
+++ b/Using-Receiver-as-transmitter.md
@@ -0,0 +1,35 @@
+As all openLRS receivers are capable of transmission they can be used as 100mW transmitters.
+
+### Connections
+9ch modules (Hawkeye/Flytron/OrangeRX)
+
+ output1(rssi) - passive buzzer (~speaker, multi freq support)
+ output2(ch1) - unused
+ output3(ch2) - active buzzer (single freq)
+ output4(ch3) - bind button (between signal and ground)
+ output5(ch4) - PPM input
+ output6(ch5) - RED led (between signal and ground, duplicates onboard LED)
+ output7(ch6) - GREEN led (between signal and ground, duplicates onboard LED)
+ output8(ch7) - unused
+ output9(ch8) - unused
+
+4/6ch modules (DTF-UHF)
+
+ output1 - PPM input
+ output2 - bind button (between signal and ground)
+ output3 - passive buzzer (~speaker, multi freq support)
+ output4 - active buzzer (single freq)
+ output5 - RED led (between signal and ground, duplicates onboard LED)
+ output6 - GREEN led (between signal and ground, duplicates onboard LED)
+
+## Power considerations
+As the receivers have fairly small voltage regulator it is not recommended to power them with more than 6V or so. Use a BEC to preregulate voltage to 5/6V before feeding to RX module (via servo connectors)
+
+## Bind button
+A normal single contact non locking push button should be used, as pullup is provided internally the button goes between GND and signal pin.
+
+## Connecting buzzers
+As the outputs have resistors on them it is necessary to have a transistor driver to be able to drive buzzer/speaker.
+
+## external LEDs
+LED outputs are duplicated on IO pins to allow easily mount LEDs in visible location. There is 1kOhm resistors thus very limited current is provided so LEDs should be high efficiency ones (ultrabright).
\ No newline at end of file
diff --git a/Using-the-LBEEP-feature.md b/Using-the-LBEEP-feature.md
new file mode 100644
index 0000000..b2ef1b4
--- /dev/null
+++ b/Using-the-LBEEP-feature.md
@@ -0,0 +1,20 @@
+## Description
+LBEEP allows implementing link quality 'beeper' with no extra hardware by utilizing the audio channel of the FPV video link.
+Note that there are 2 output options on your module
+* packet loss beeper / LBEEP: gives you a beep on packet loss as an early warning
+* link loss indicator: lets you know when your link has been entirely lost
+
+## Connection alternative 1 - no other audio
+In this mode the audio is silent and beeps will be emitted when packets are lost.
+
+Circuit:
+
+
+
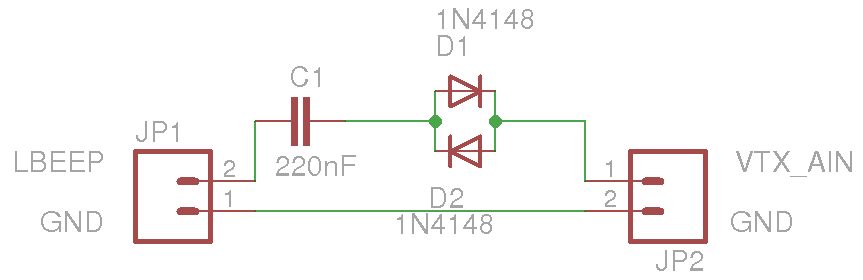
+## connection alternative 2 - mixing to existing audio
+The lbeep output can be connected using pair of diodes to allow normal audio to pass thru unaffected while the beep will 'take over' when needed.
+(if you wonder, the circuit blocks DC current from crossing, and remove 0.7V from voltage crossing the diodes, preventing line level (1V) sound from leaking much into the openlrsng module, while the openlrsng module can send a higher voltage and have that flow to the line level audio connection)
+
+Circuit:
+
+
\ No newline at end of file
diff --git a/_Footer.md b/_Footer.md
new file mode 100644
index 0000000..7fd8eac
--- /dev/null
+++ b/_Footer.md
@@ -0,0 +1,2 @@
+***
+[OpenLRSng.org](http://openlrsng.org/) || [Firmware](http://github.com/openLRSng/openLRSng) || [IRC chat (#OpenLRS @freenode)](http://webchat.freenode.net/?channels=openLRS)
\ No newline at end of file
diff --git a/supported-hardware---feature-table.mediawiki b/supported-hardware---feature-table.mediawiki
new file mode 100644
index 0000000..62cb341
--- /dev/null
+++ b/supported-hardware---feature-table.mediawiki
@@ -0,0 +1,57 @@
+== Transmitter hardware ==
+{|
+! Name !! Hardware type(no) !! PPM input by timer !! output power (unmodified) !! integrated RF lowpass filter !! integrated USB !! link
+|-
+|Hawkeye openLRSng (JR/Futaba) || 4 || yes || 400-800mW || - || no || http://www.hobbiesfly.com/transmitter-receiver/hawkeye-openlrs-uhf-system-jr-turnigy-taranis-compatible.html
+|-
+|Hawkeye DTFUHF deluxe JR || 4 || yes || 400-800mW || 490MHZ || yes || http://www.hobbiesfly.com/transmitter-receiver/dtf-uhf-deluxetx-taranis-jr-turnigy-compatible.html
+|-
+|Hawkeye/DTFUHF deluxe TX || 6 || yes || 400-800mW || 490MHz || yes || http://www.hobbiesfly.com/transmitter-receiver/dtf-uhf-deluxetx-transmitter.html
+|-
+|Flytron M1 (100mW) || 0 || no || 1.2-100mW || - || no || N/A
+|-
+|OrangeRX openLRS / Flytron M2 (100mW) || 2 || no || 1.2-100mW || - || no || https://www.hobbyking.com/hobbyking/store/__27095__OrangeRx_Open_LRS_433MHz_TX_Module_JR_Turnigy_compatible_.html
+|-
+|OrangeRX openLRS / Flytron M3 (1W) || 2 || no || 250-500mW || - || no || https://www.hobbyking.com/hobbyking/store/__40031__OrangeRX_Open_LRS_433MHz_Transmitter_1W_compatible_with_Futaba_radio_.html
+|-
+|OrangeRX/Flytron 9ch RX || 3 || yes || 1.2-100mW || - || no || https://www.hobbyking.com/hobbyking/store/__27096__OrangeRx_Open_LRS_433MHz_9Ch_Receiver.html
+|-
+|Hawkeye 9ch RX (blue) || 3 || yes || 1.2-100mW || - || no || http://www.hobbiesfly.com/transmitter-receiver/hawkeye-9-channel-receiver.html
+|-
+|Hawkeye 9ch RX (black) || 3 || yes || 1.2-100mW || 490MHz || no || http://www.hobbiesfly.com/transmitter-receiver/hawkeye-9-channel-long-range-receiver.html
+|-
+|Hawkeye/DTFUHF 6(/4)ch || 5 || yes || 1.2-100mW || 490MHz || no || http://www.hobbiesfly.com/transmitter-receiver/dtf-uhf-6-channel-long-range-receiver.html
+|}
+== Receiver hardware ==
+{|
+! Name !! Hardware type(no) !! output power (unmodified) !! integrated RF lowpass filter !! max PWM outputs !! improved power filtering !! USB !! size
+|-
+|OrangeRX 9ch RX || 3 || 1.2-100mW || - || 13 || no || - || 51x28x16mm 10.0g || https://www.hobbyking.com/hobbyking/store/__27096__OrangeRx_Open_LRS_433MHz_9Ch_Receiver.html
+|-
+|Flytron 9ch RX || 3 || 1.2-100mW || - || 13 || no || - || 57x27x12mm 8.4g
+|-
+|Hawkeye 9ch RX (blue) || 3 || 1.2-100mW || - || 13 || yes || - || XxXxXmm 9.6g || http://www.hobbiesfly.com/transmitter-receiver/hawkeye-9-channel-receiver.html
+|-
+|Hawkeye 9ch RX (black) || 3 || 1.2-100mW || 490MHz || 13 || yes || - || XxXxXmm 9.6g || http://www.hobbiesfly.com/transmitter-receiver/hawkeye-9-channel-long-range-receiver.html
+|-
+|Hawkeye/DTFUHF 6(/4)ch || 5 || 1.2-100mW || 490MHz || 8 || yes || - || 55x20x8mm 7.0g || http://www.hobbiesfly.com/transmitter-receiver/dtf-uhf-6-channel-long-range-receiver.html
+|-
+|Hawkeye/DTFUHF miniRX || 5 || 1.2-100mW || 490MHz || 8 || yes || yes || 57x25x8mm 9.7g || http://www.hobbiesfly.com/transmitter-receiver/dtf-uhf-minirx-long-range-receiver.html
+|-
+|Hawkeye/DTFUHF 1W RX || 5 || ~800mW || 490MHz || 8 || yes || yes || 57x28x8mm 15g || http://www.hobbiesfly.com/transmitter-receiver/dtf-uhf-1watt-long-range-receiver.html
+|-
+|Brotronics PowerTowerRX || 7 || 100mW || 490MHz || 7 || yes || yes || 53x29x13mm || http://www.multirotorsuperstore.com/radio/radio-receivers/brotronics-powertowerrx-for-openlrsng.html
+|-
+|OpenLRSng MicroRX || 8 || 100mW || 490MHz || 5 || yes || - || 22x22x8mm 5g
+|-
+|Brotronics BroversityRX || 9 || 100mW || 490MHz || tbd || yes || yes || tbd || http://www.hobbiesfly.com/transmitter-receiver/brotronics-openlrsng-broversityrx.html
+|-
+|Brotronics 4ch remix || 5 || 100mW || 490MHz || tbd || yes || - || 31x17x8 5g || http://www.hobbiesfly.com/transmitter-receiver/brotronics-4ch-remix-long-range-receiver.html
+|-
+|Brotronics subMicroRX || 5 || 100mW || 490MHz || 4 || yes || - || 17x16x6 2g || http://www.hobbiesfly.com/transmitter-receiver/brotronics-submicrolrs.html
+|-
+|OrangeRX/Flytron TX 100mW/1W|| 2 || 1-100mW / 400mW || - || 7 || ? || - || tbd. || https://www.hobbyking.com/hobbyking/store/__40031__OrangeRX_Open_LRS_433MHz_Transmitter_1W_compatible_with_Futaba_radio_.html
+|}
+
+All receivers support 2 x analog input / I2C / telemetry serial port / up to 16ch PPM
+**Brotronics Modules support real working Sbus. On the Brodiversity module, port 11 is mapped to the TX pin (non inverted) and the Sbus pin (inverted). As a result you can select SBUS for port 11 and connect a simple servo cable to a pixhawk to the RCIN output, and SBUS will get through without problems** (other receivers need a signal inverter for SBUS to work)
\ No newline at end of file